Modern Game Engine Course Notes 04
Course from: BoomingTech
Physics System
Basic Concepts
Physics Actors and Shapes
Actor – Summary
- Static Actor
- Not moving
- Dynamic Actor
- Can be affected by forces/torques/impulses
- Trigger
- Like static actor, not moving
- But not blocking
- Notifies when actors enter or exit
- Kinematic Actor
- Ignoring physics rules
- Controlled by gameplay logic directly
Actor Shapes
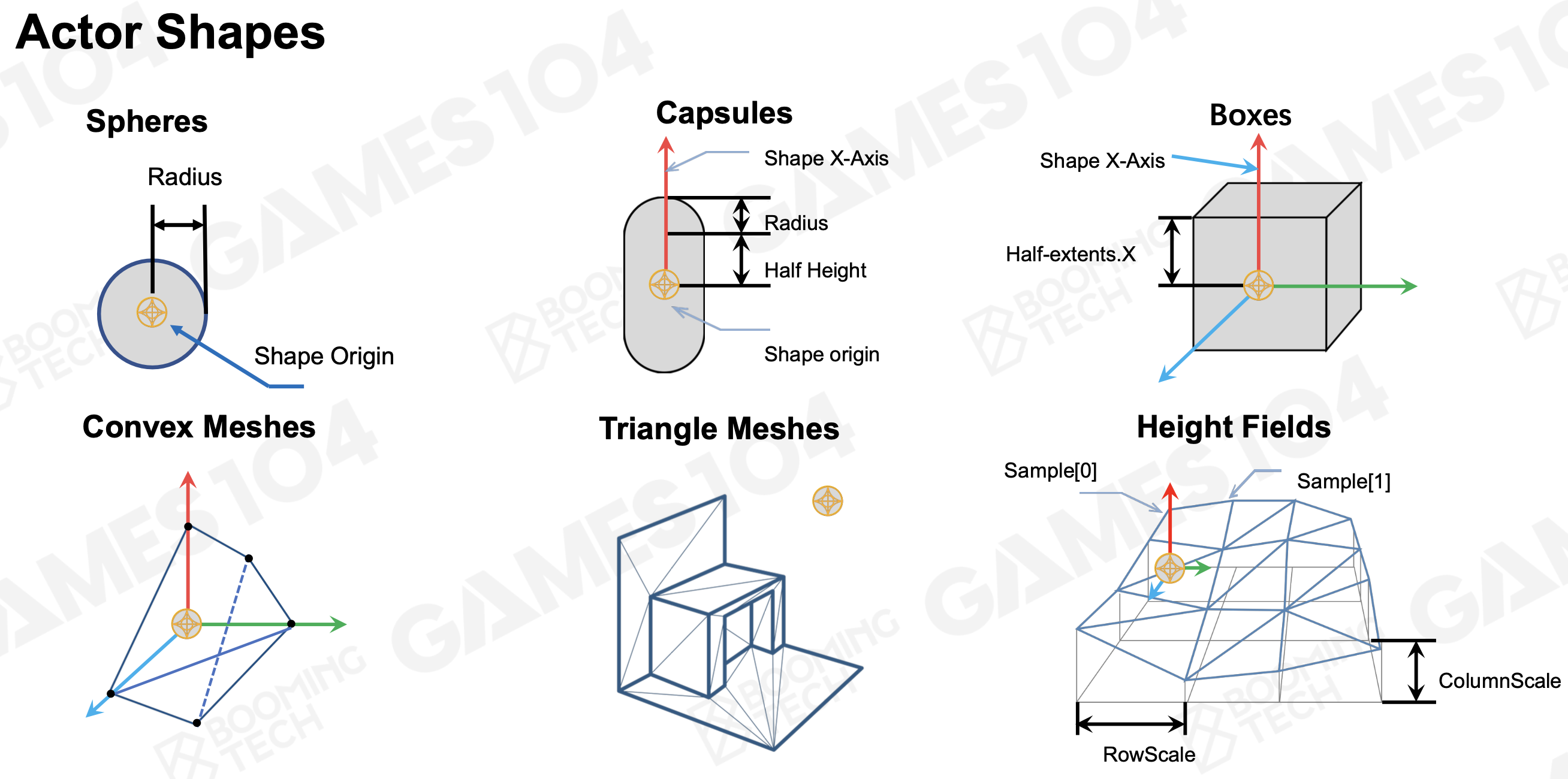
Wrap Objects with Physics Shapes
- Approximated Wrapping
- Don’t need to be perfect
- Simplicity
- Prefer simple shapes (avoid triangle mesh if possible)
- Least shapes
Shape Properties
- Mass and density
- Friction and restitution
Forces
Force
- We can apply forces to give dynamic objects accelerations, therefore affecting their movements
- Examples • Gravity
- Drag
- Friction
Impulse
- We can change velocity of actors immediately by applying impulses
- E.g. simulating an explosion
Movements
Newton’s 1st Law of Motion
v(t + dt) = v(t), x(t + dt) = x(t) + v(t)dt
Newton’s 2nd Law of Motion
F = ma, a(t) = dv(t)/dt = d^2x(t)/dt^2
Example of Simple Movement
- Position
- Orientation
- Linear Velocity
- Angular Velocity
Euler’s Method
Explicit (Forward) Euler’s Method
v(t + dt) = v(t) + F(t)dt / M
x(t + dt) = x(t) + v(t)dt
Pros:
- Easy to calculate, efficient
Cons:
- Poor stability
- Energy growing as time progresses
Implicit (Backward) Euler’s Method
v(t + dt) = v(t) + F(t + dt)dt / M
x(t + dt) = x(t) + v(t + dt)dt
Pros:
- Unconditionally stable
Cons:
- Expensive to solve
- Challenging to implement when non-linearity presents
- Energy attenuates as time progresses
Semi-implicit Euler’s Method
v(t + dt) = v(t) + F(t)dt / M
x(t + dt) = x(t) + v(t + dt)dt
- Conditionally stable
- Easy to calculate, efficient
- Preserves energy as time progresses
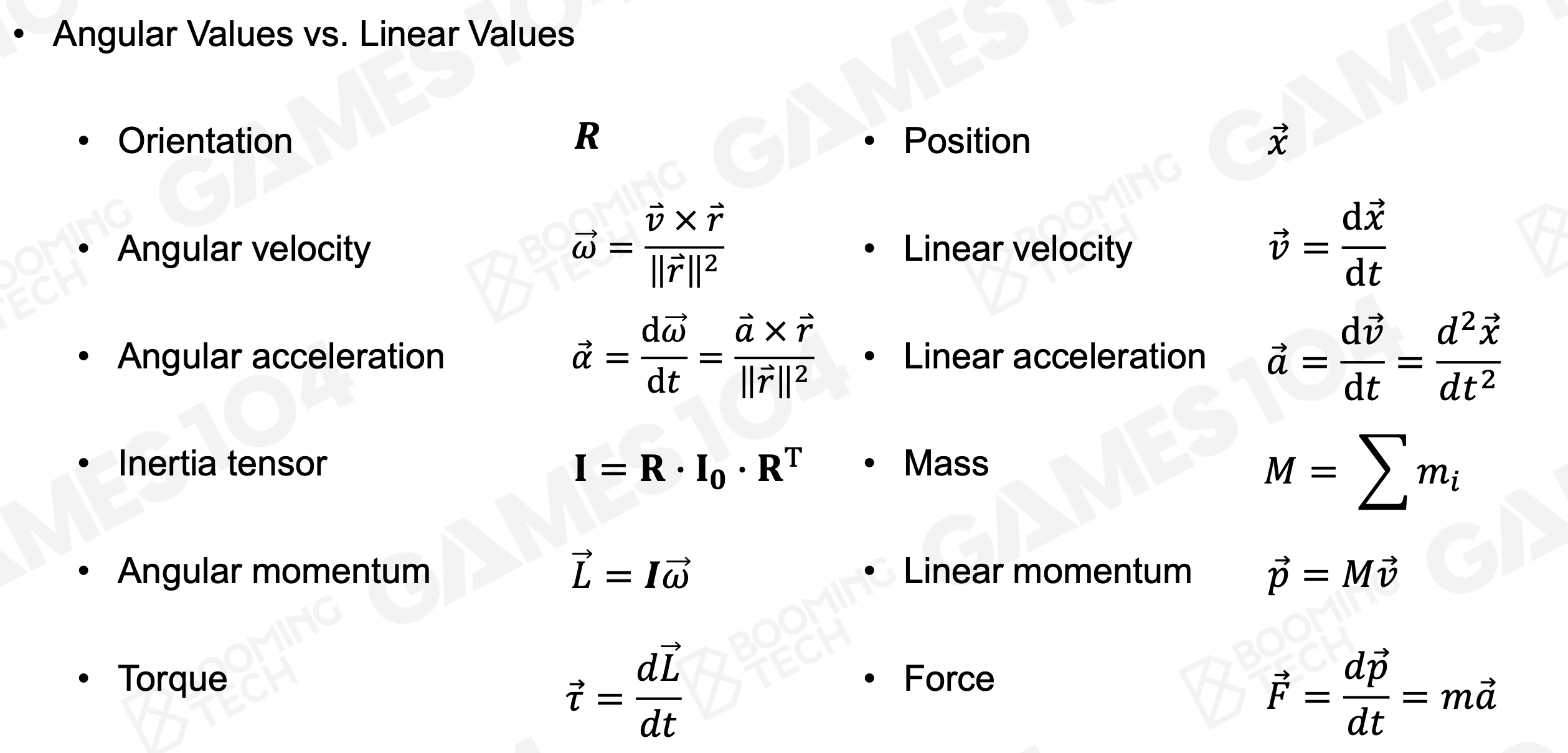
Rigid Body Dynamics
Rigid body Dynamics
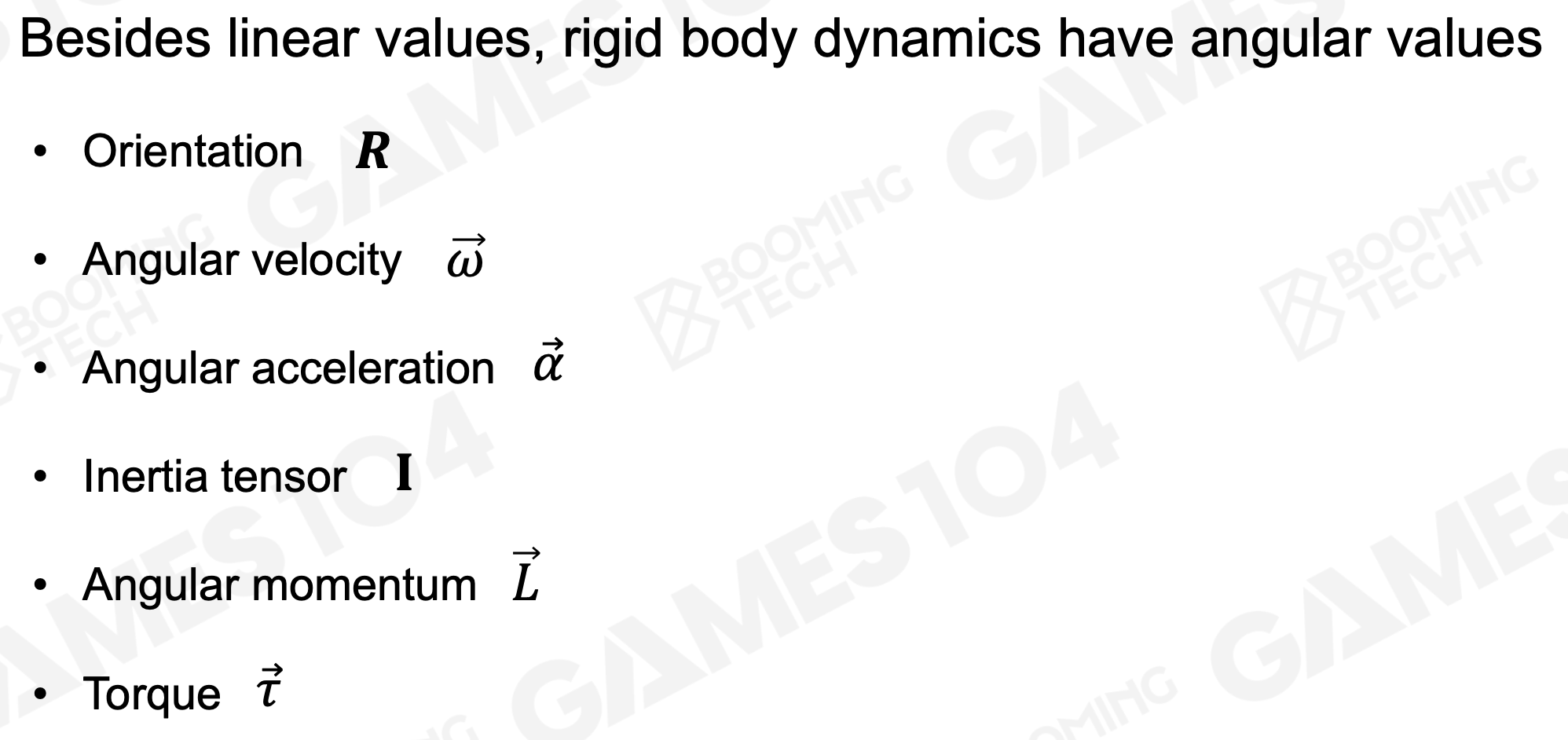
// Orientation:
Matrix
R = [r_xx, r_yx, r_zx
r_xy, r_yy, r_zy
r_xz, r_yz, r_zz]
Quaternion
q = (s, v)
// Angular Velocity
omega = (d theta) / dt = (v x r) / ||r||^2
// Angular Acceleration
alpha = (d omega) / dt = (a x r) / ||r||^2
// Rotational Inertia
I = R I_0 R^T
// Angular Momentum
L = I omega
// Torque
tau = r x F = dL/dt
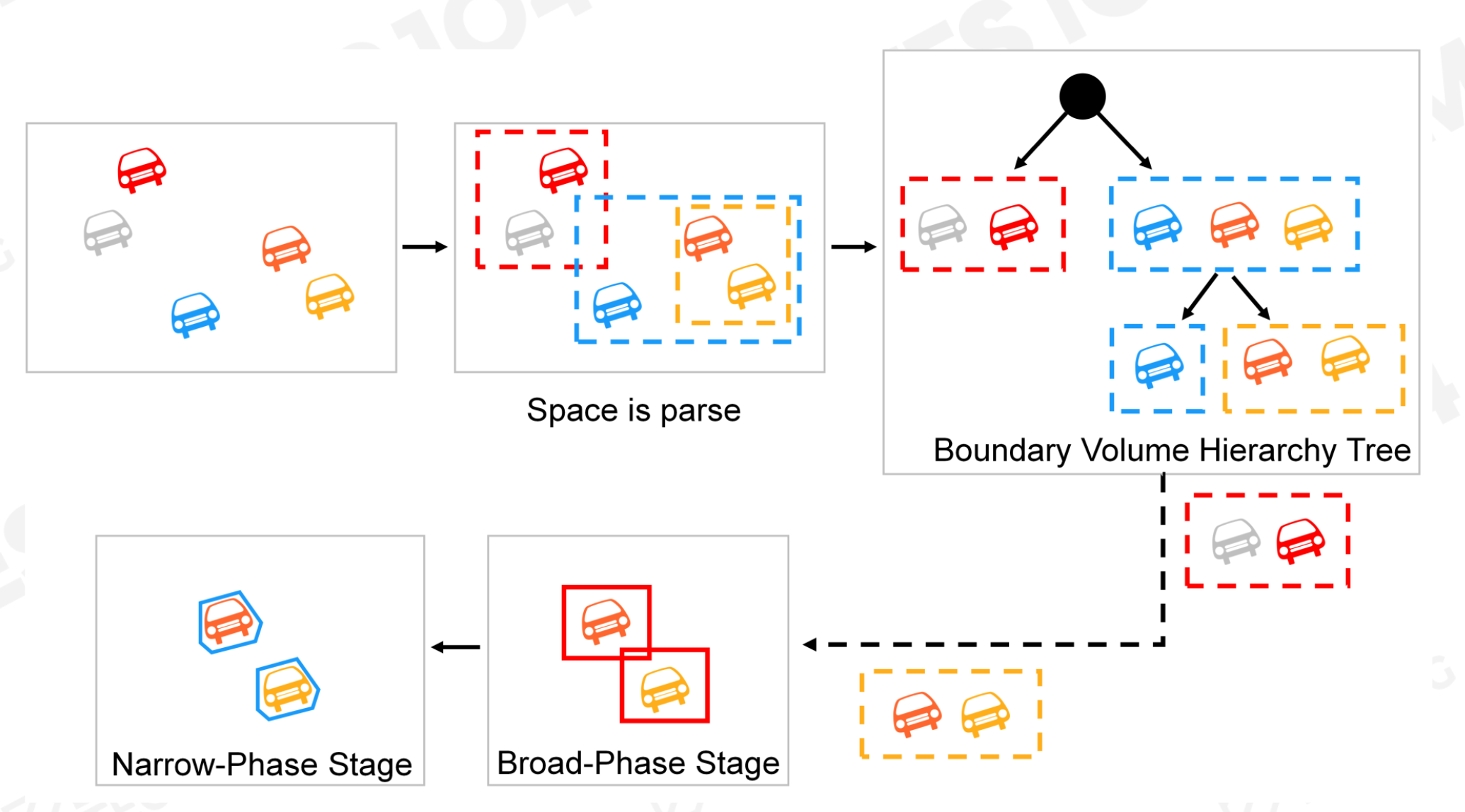
Collision Detection
Collision Detection – Two Phases
- Broad phase
- Find intersected rigid body AABBs
- Potential overlapped rigid body pairs
- Narrow phase
- Detect overlapping precisely
- Generate contact information
Broad Phase
- Objective
- Find intersected rigid body AABBs
- Potential overlapped rigid body pairs
- Two approaches
- Space partitioning: i. e. Boundary Volume Hierarchy (BVH) Tree
- Sort and Sweep
Broad Phase - BVH
Broad Phase - Sort and Sweep
- Sorting Stage (Initialize)
For each axis
- Sort AABB bounds along each axis when initializing the scene
- Check AABB bounds of actors along each axis
- A_max ≥ B_max indicates potential overlap of A and B
- Sweeping Stage (Update)
- Only check swapping of bounds
- temporal coherence
- local steps from frame to frame - Swapping of min and max indicates add/delete potential overlap pair from overlaps set - Swapping of min and min or max and max does not affect overlaps set
Narrow Phase – Objectives
- Detect overlapping precisely
- Generate contact information
- Contact manifold: approximated with a set of contact points
- Contact normal
- Penetration depth
Narrow Phase – Three approaches
- Basic Shape Intersection Test
- Minkowski Difference-based Methods & GJK Algorithm
- Separating Axis Theorem
Collision Resolution
Three approaches
- Applying Penalty Force
- Solving Velocity Constraints
- Solving Position Constraints (will be covered in the next lecture)
Solving Constraints
- Modelling constraints based on Lagrangian mechanics
- Collision constraints:
- Non-penetration
- Restitution
- Friction
- Collision constraints:
- Iterative solver
Approaches:
- Sequential impulses
- Semi-implicit integration
- Non-linear Gauss-Seidel Method
Characteristics:
- Fast, stable for most cases
- Commonly used in most physics engines
Scene Query
Raycast
- Intersect a user-defined ray with the whole scene
- Point, direction, distance and query mode can be defined
- Multiple hits
- Closet hit
- Any hit
Sweep
- Geometrically similar to raycast
- Shape and pose can be defined
- Box, sphere, capsule and convex
Overlap
- Search a region enclosed by a specified shape for any overlapping objects in the scene
- Box, sphere, capsule and convex
Collision Group
- Actor has a collision group property
- Player: Pawn
- Obstacle: Static
- Movable box: Dynamic
- Trigger box: Trigger
- …
- Scene query can filter collision groups
- Player moving query collision group: (Pawn, Static, Dynamic)
- Trigger query collision group: (Pawn)
- …
Efficiency, Accuracy, and Determinism
Simulation Optimization - Island
Simulation Optimization – Sleeping
- Simulating and solving all rigid bodies uses lots of resources
- Introducing sleeping
- A rigid body does not move for a period of time
- Until some external force acts on it
Continuous Collision Detection
- Thin obstacle vs. fast moving actors
- Tunneling
- Solution to tunneling
- Let it be - something unremarkable
- Make the floor thicker - boundary air wall
- Time-of-Impact (TOI) – Conservative advancement
- Estimate a “safe” time substep A and B won’t collide
- Advance A and B by the “safe” substep
- Repeat until the distance is below a threshold
Deterministic Simulation
- Multiplayer game with gameplay-impacting physics
- Small error causes butterfly effect • Synchronizing states requires bandwidth
- Synchronizing inputs requires deterministic simulations
Same old states + same inputs = same new states
Requirements:
- Fixed step of physics simulation
- Deterministic simulation solving sequence
- Float point consistency
Applications
Character Controller
Character Controller vs. Rigid Body Dynamics
- Controllable rigid body interaction
- Almost infinite friction / No restitution
- Accelerate and brake change direction almost instantly and teleport
Legacy Hack in Character Control
- A lot of carefully tweaked values provide a good feeling
- Legacy code in the industry
Build a Controller in Physics System
- Kinematic Actor
- Not affected by physics rules
- Push other objects
- Shape: Humanoids
- Capsule
- Box
- Convex
Collide with environment
- Collision detection with environment
- Sweep test
- Auto slide with wall
- Calculate tangent direction
- Move along tangent direction
Auto Stepping and its Problem
- Sweep with step offset
- Virtual gap
Slope Limits and Force Sliding Down
- Max climb slopes
- Slide down on steep slopes
Controller Volume Update
- Change the controller volume size at runtime, e.g. crouching
- Overlap test before update to avoid insertion inside objects
Controller Push Objects
- Hit Callback when character controller collides with dynamic actor
- Apply force to dynamic actor
Standing on Moving Platform
Ragdoll
Map Skeleton to Rigid Bodies
- Bind key joints with rigid bodies
Importance of Joint Constraints
- The constraints should match the anatomical skeleton
- Adjust by developer
Carefully Tweaked Constraints
- The rigid bodies should fit the mesh as much as possible
Animating Skeleton by Ragdoll
- Update skeleton per frame
- Intermediate joints -> Bind pose
- Active joints -> Rigid body pose
- Leaf joints -> Animation pose
Blending between Animation and Ragdoll
- Kinematic state ragdoll
- Rigid bodies are driven by animation
- Dynamic state ragdoll
- Rigid bodies are simulated by physics
Powered Ragdoll – Physics-Animation Blending
- Blend between the animation pose and the physics pose
Clothing
Animation-based Cloth Simulation
- Pipeline
- Animators produce the animation of bones
- Generate more animation data via DCC tools
- Engine replays the animation when running
- Pros
- Cheap
- Controllable
- Cons
- Not realistic
- Could not interact with environment
- The designation of clothes is limited
Rigid Body-based Cloth Simulation
- Pipeline
- The bones of cloth are bound with rigid bodies and constraints
- The effect are solved by physics engine
- Pros
- Cheap
- Interactive
- Cons
- Undetermined quality
- Work load for animators
- Not robust
- Needs physics engine with high performance
Mesh-based Cloth Simulation
- Render mesh -> Physics mesh
- Paint cloth simulation constraints, add maximum radius constraints to each vertex
- Set cloth physical material
- Cloth Solver - Mass-Spring system:
- Spring force:
F_s = k_spring dx - Spring damping force:
F_D = -k_damping v
- Spring force:
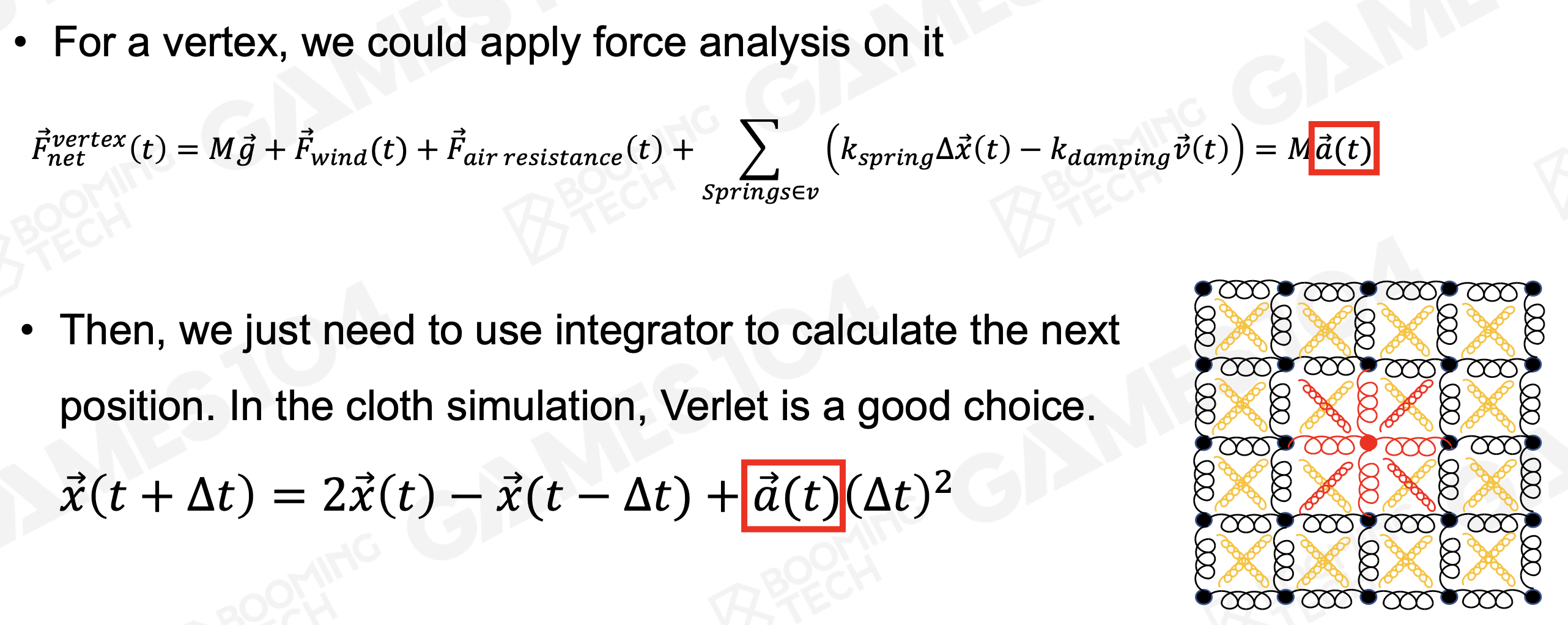
Verlet Integration
- Verlet Integration does not need to consider about velocity when calculate, so it is faster.
x(t + dt) = 2x(t) - x(t - dt) + a(t)(dt)^2
Cloth Solver - Position Based Dynamics (Advanced choice)
Self Collision
- As a kind of flexible material, cloth can fold and collide with itself
- This is pretty tricky in real-time game physics simulation
- Common solutions:
- Make the cloth thicker (simplest)
- Use many substeps in one physics simulation step
- Enforce maximal velocity
- Introduce contact constraints and friction constraints
Destruction
Destruction is Important
- Not only a visual effect
- Making the game world much more vivid and immersive
- A key mechanism in many games
Chunk Hierarchy
- Organize the fractured chunks level by level
- Different damage threshold for each level
Connectivity Graph - Construct connectivity graph for chunks at the deepest level
- One node per chunk
- One edge if two chunks share a face
- Update at runtime
Connectivity Value - The value on each edge in the connectivity graph
- How much damage needed to break the edge
- Update after each damage
- Break the edge when the value goes to 0
Damage Calculation
- Calculate damage from impulse at the impact point
I: the applied impulse (e.g. by collision)H: the material hardness of the rigid body- The damage at the impact point is
D = I / H
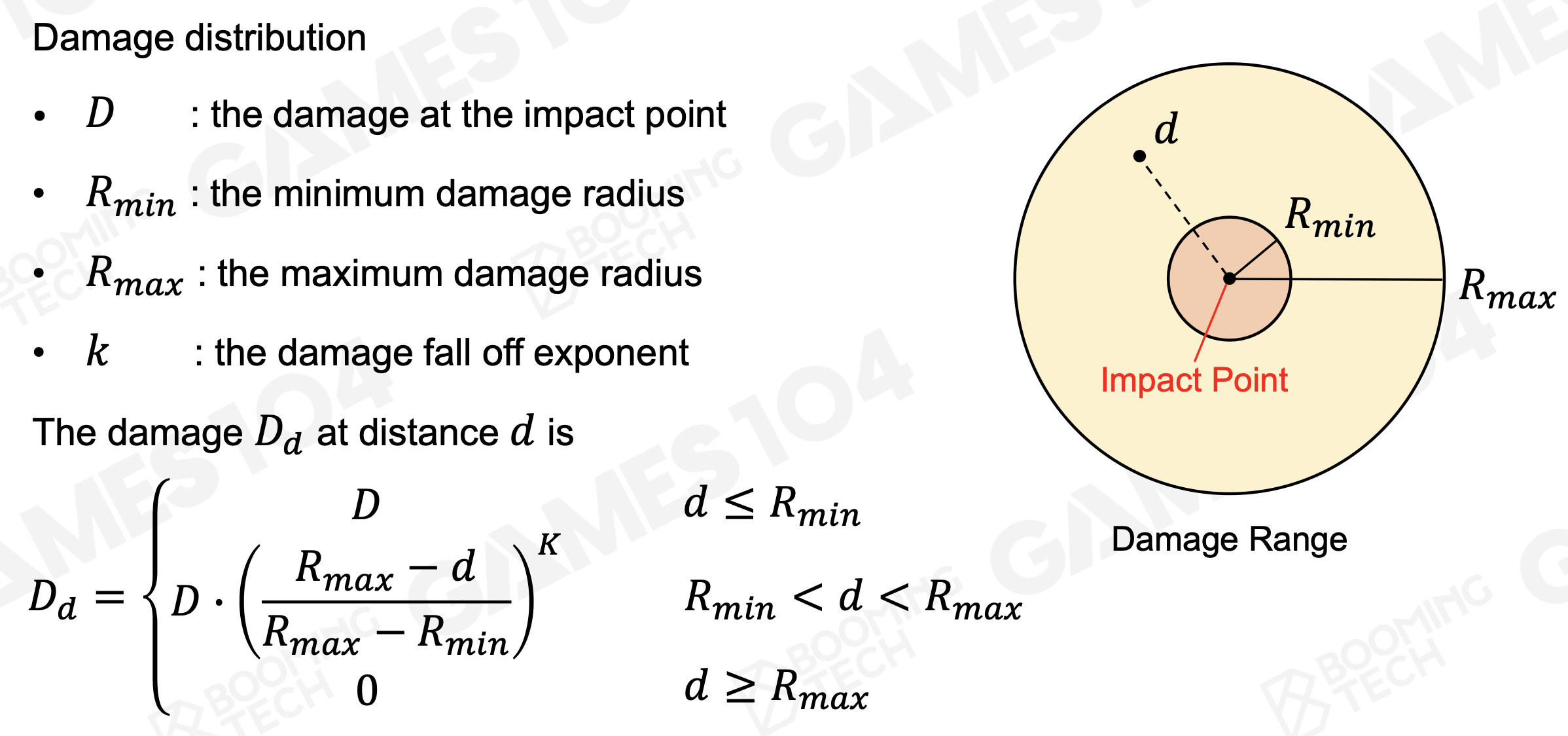
- Damage distribution
Build Chunks by Voronoi Diagram
- A partition of a plane into regions close to each of seeds
Voronoi Cell
- the region for each seed
- Points in the cell are closer to the seed than to any other
Fracturing with Voronoi Diagram - 2D Mesh
Pick N random points within the bounding rect of the mesh
- Construct the Voronoi diagram
- Intersect each Voronoi cell with the mesh to get all fractured chunks
Fracturing with Voronoi Diagram - 3D Mesh
Similar to the 2D situation, but not trivial
- New triangles need to be generated for all fracture surfaces
Generate triangles for all fracture surfaces
- Usually by Delaunay Triangulation(is dual to Voronoi diagram)
- New texture and texture coordinates
Different Fracture Patterns with Voronoi Diagram
- Uniform random pattern
- Clustered pattern
- Radial pattern
- etc.
Handle destruction after collision
- New rigid bodies may be generated after destruction
Make it more realistic - Fracture is not enough
- Sound effects
- Particle effects
- Navigation updated
Issues with Destruction
- Add destruction with caution
- Numerous debris may cause larger performance overhead
- Empirical when artists design the destruction effect
- Many parameters to be tuned, e.g. fracture parameters
- Produce performance highly depends on the authoring tool
Vehicle
Vehicle Mechanism Modeling
- A rigid body actor
- Shapes for the chassis and wheels
- Scene query for the suspension simulation
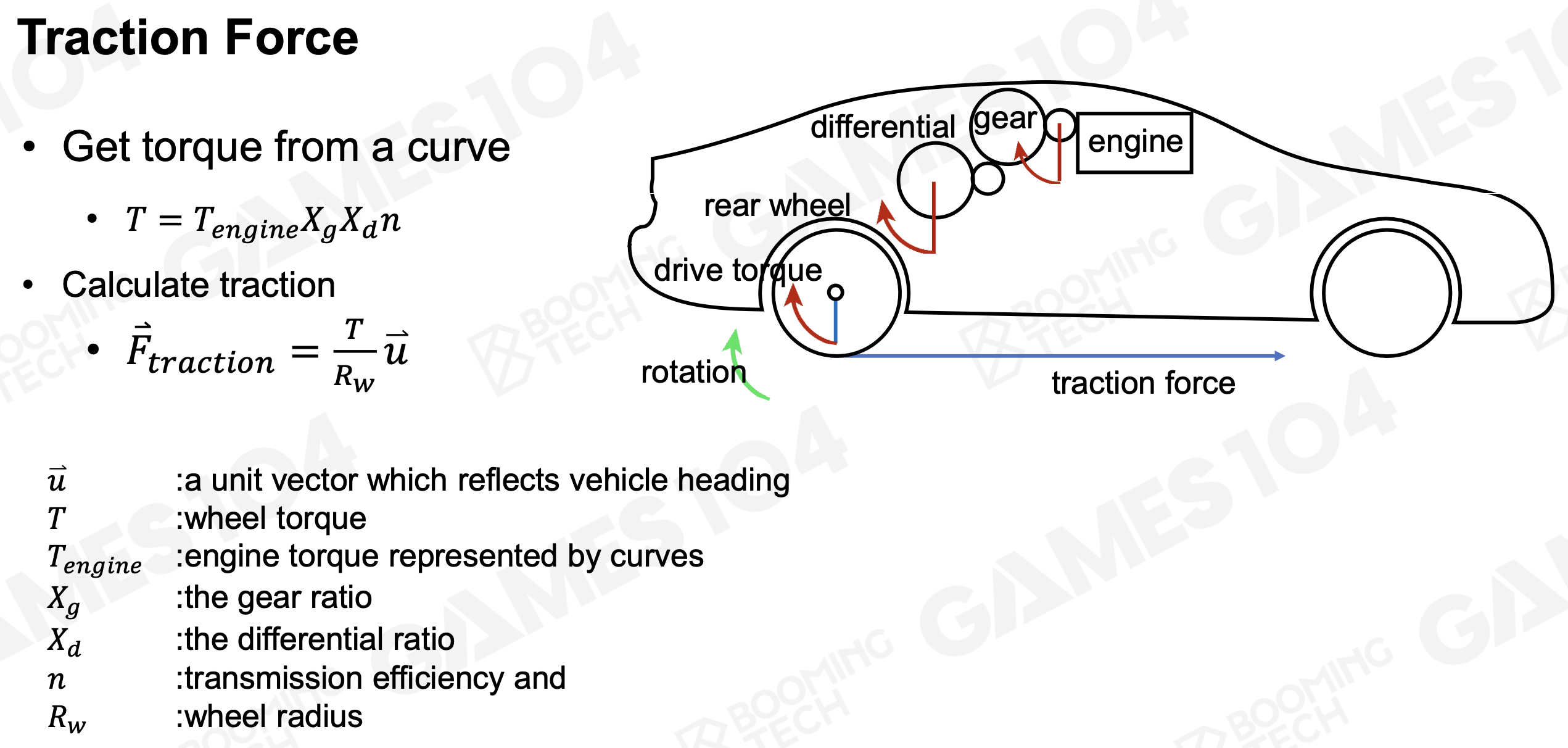
Traction Force
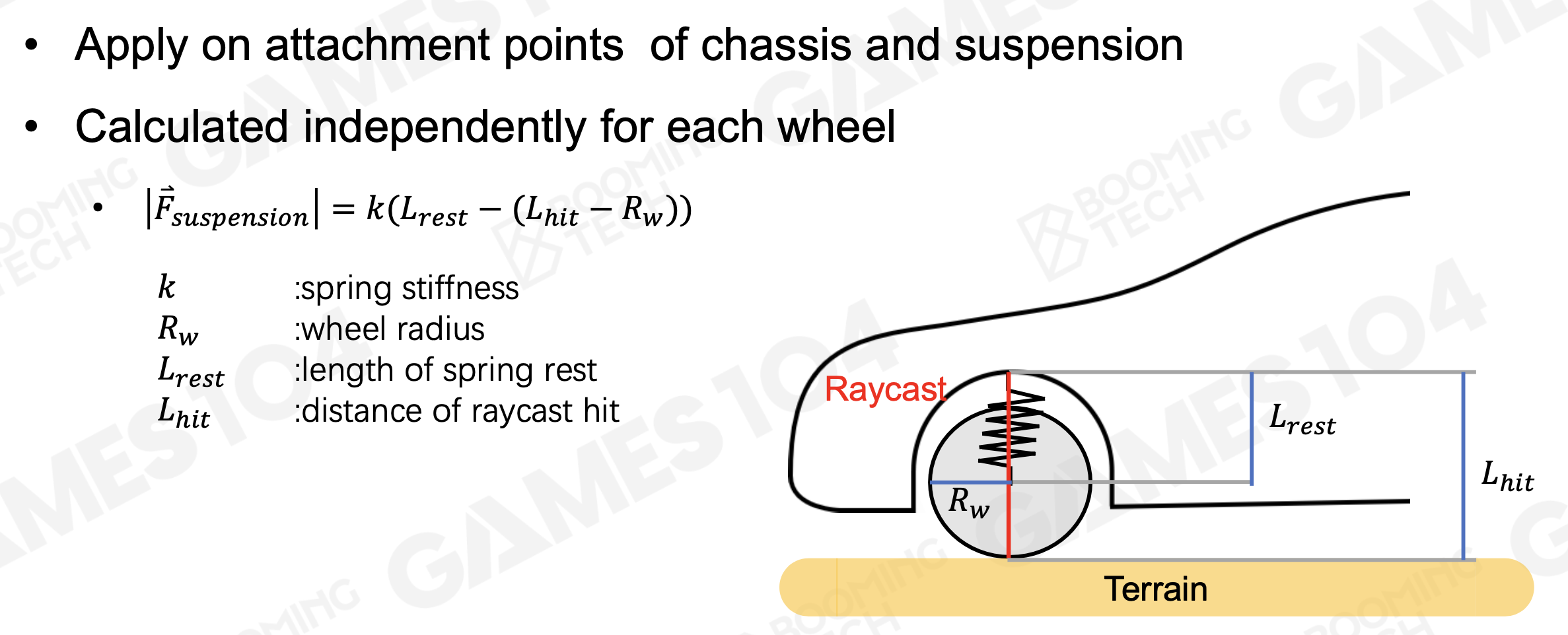
Suspensions Force
Tire Forces
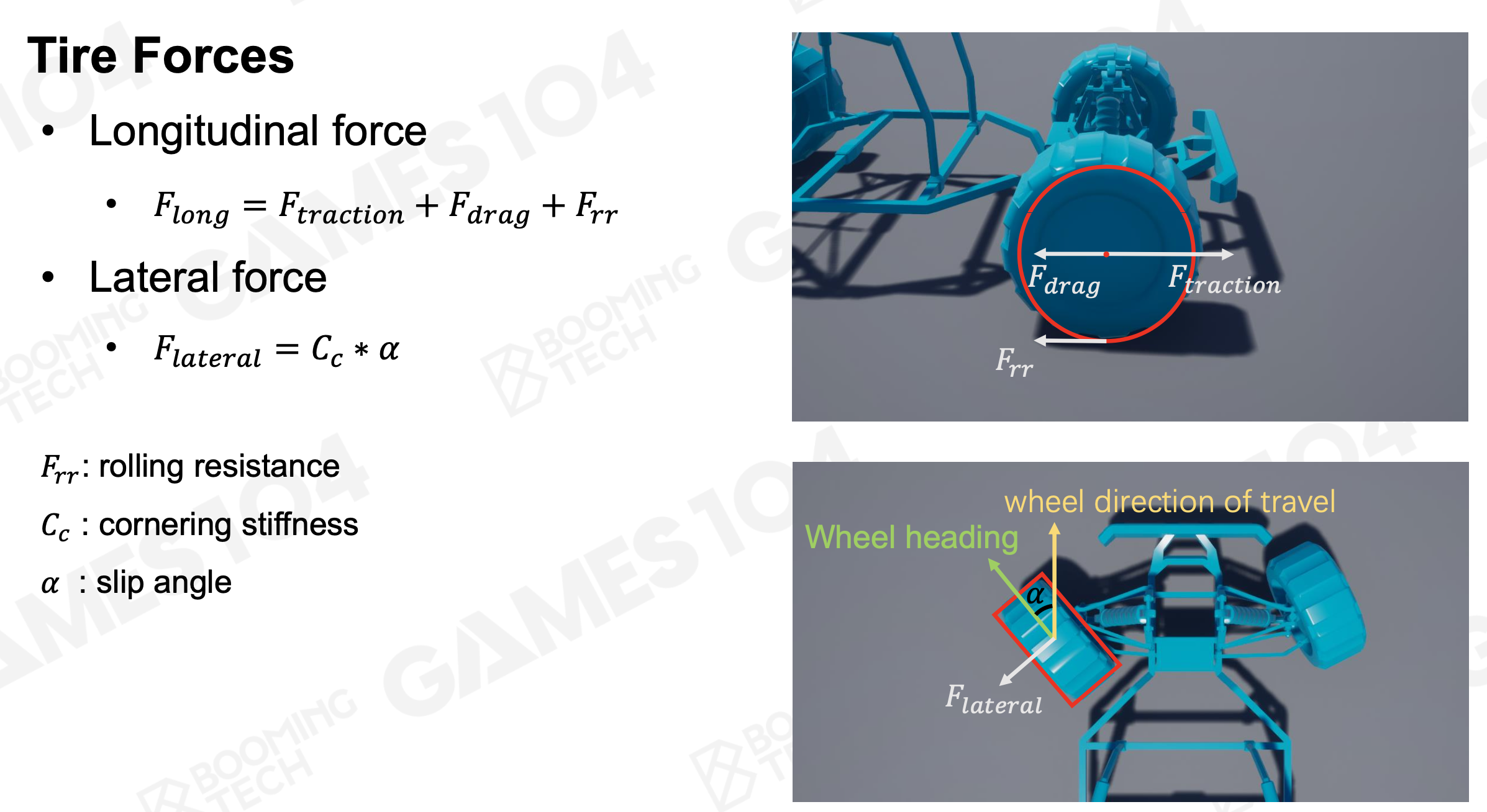
Center of Mass
- Affects handling, acceleration, and traction
- Should be a tunable value
- Affects the stability of the vehicle in the air
- front-heavy -> dive
- rear-heavy -> stabilize
- Affects vehicle steering control
- front-heavy -> understeering
- rear-heavy -> oversteering
Weight Transfer
- Affects the maximum traction force per wheel
Steering angles
- Same steering angle causes slipping
- Ackermann steering
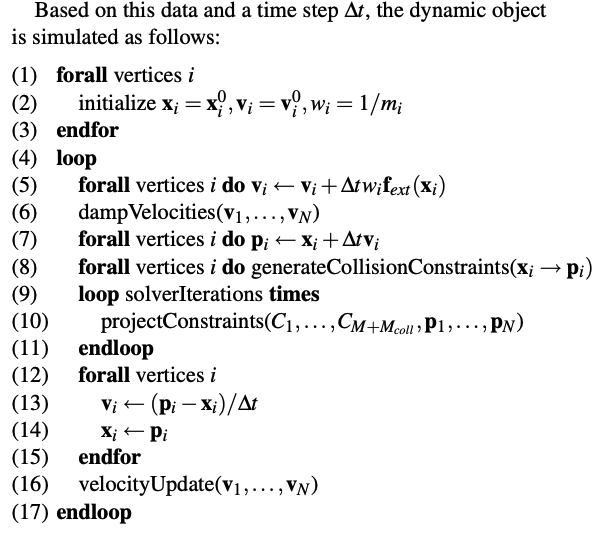
Advanced Physics : PBD/XPBD
Note: only for reference
Position Based Dynamics PBD - Constraints Projection
Advantages of PBD
- Projecting constraints to position corrections
- Fast, stable for most cases
- Hard to control constraint satisfaction
- Cannot prioritize collision constraints over others
- Commonly used for cloth simulation in games
- NVIDIA FleX
Extended Position Based Dynamics (XPBD)
- Use compliances as inverse of constraint stiffness to handle infinite stiffness constraints (rigid body)
- Reintroduce rigid body orientation to XPBD for rigid body simulation application
- Unreal Chaos physics engine