Modern Game Engine Course Notes 03
Course from: BoomingTech
Animation System
Basics of Animation Technology
Fundamental base: The persistence of vision & Illusory motion (Phi phenomenon)
Challenges in Game Animation
- Interactive and dynamic animation
- Vary according to the interaction
- Cooperate with other gameplay systems
- Make adjustments in complex environments
- Real-time
- Compute per frame
- Massive animation data(Disk and memory)
- Realism
- More vivid expression
- More authentic experience
2D Animation - Sprite animation
The electronic equivalent to cel animation
- A sprite is a small bitmap that can be overlaid on top of a background image without disrupting it
- The sequence of frames was designed so that it animates smoothly even when it is repeated indefinitely
Application
- 2D character
- Sprite on 2D background image
- Sprite on top of 3D rendered environment
- Game effect
- Sprite sheet texture for particles
Live2D A technology to generate 2D animation without 3D model
- Usually refer to eponymous software series employing the technology created by Live2D Ltd.
-
Could develop dynamic character, especially anime-style character without a 3D model.
- By applying translation, rotation and transformation to different parts and layers of image.
- Combined with real-time motion capture, could be used for Vtubing.
Make a Live2D animation
Prepare resources
- Dividing origin character image into different parts
- Set “draw order” to each parts for further use
Transform image by using control points for parts
- “ArtMesh” could be automated generated for each parts, which defined by vertices, edges and polygons
- Control points could be used to help transforming “ArtMesh”
Set animation “key frame”
- Set “key frame” to help animation interpolation
3D Animation Techniques in Games
DoF(Degrees of Freedom)
- refers to the number of independent variables or parameters of a system
- 6 DoFs per object or sub-part
Rigid Hierarchical Animation
- The earliest approach to 3D character animation
- A character is modeled as a collection of rigid pieces
- The rigid pieces are constrained to one another in a hierarchical fashion
Per-vertex Animation
- Most flexible(3 DoFs per vertex)
- Mostly implemented by Vertex Animation Texture(VAT)
- Suitable for complex morphing
- Need massive data
Morph Target Animation
- A variation on Per-vertex Animation
- Use key frames with LERP instead of sequence frames(e.g. 30 frames per second)
- Suitable for facial expression
- Per-Vertex Animation + Key Frame LERP -> Morph Target Animation
3D Skinned Animation
- Mesh(or skin) is bound to the joints of the skeleton
- Each vertex can be weighted to multiple joints
Advantages
- Need less data than per-vertex animation
- Mesh can be animated in a natural way (like human “skin”)
2D Skinned Animation - Derived from 3D skinned animation
- Break up character into various body parts
- Create body part meshes and piece them together
- Rigging, skinning and animation
Physics-based Animation
- Ragdoll
- Cloth and Fluid simulation
- Inverse Kinematics (IK)
Animation Content Creation
- Digital Content Creator + Animator
- Motion Capture
Skinned Animation Implementation
- Create mesh for a binding pose
- Create a binding skeleton for the mesh
- “Paint” per-vertices skinning weights to related skeleton
- Animate skeleton to desired pose
- Animate skinned vertices by skeleton and skinning weights
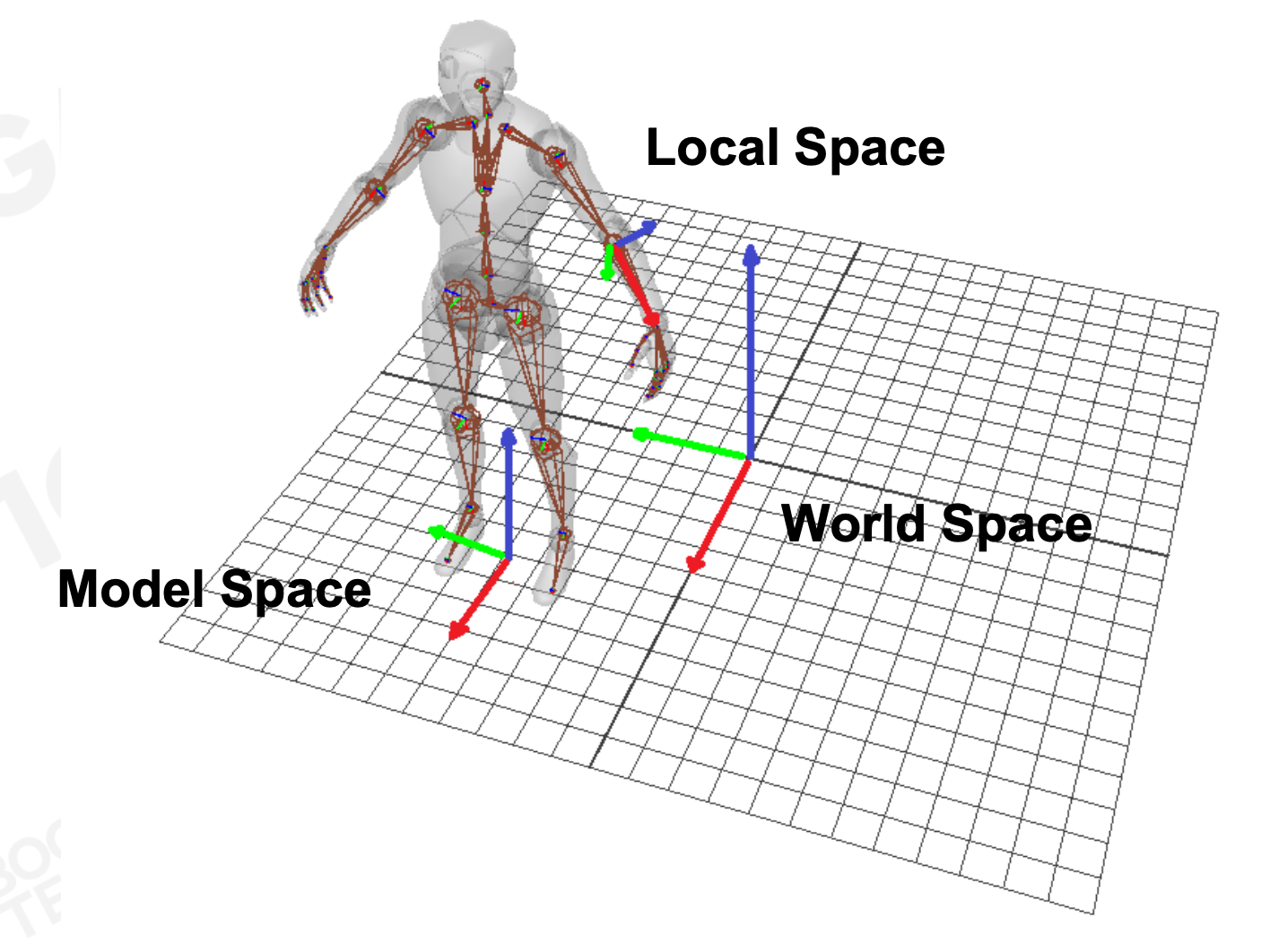
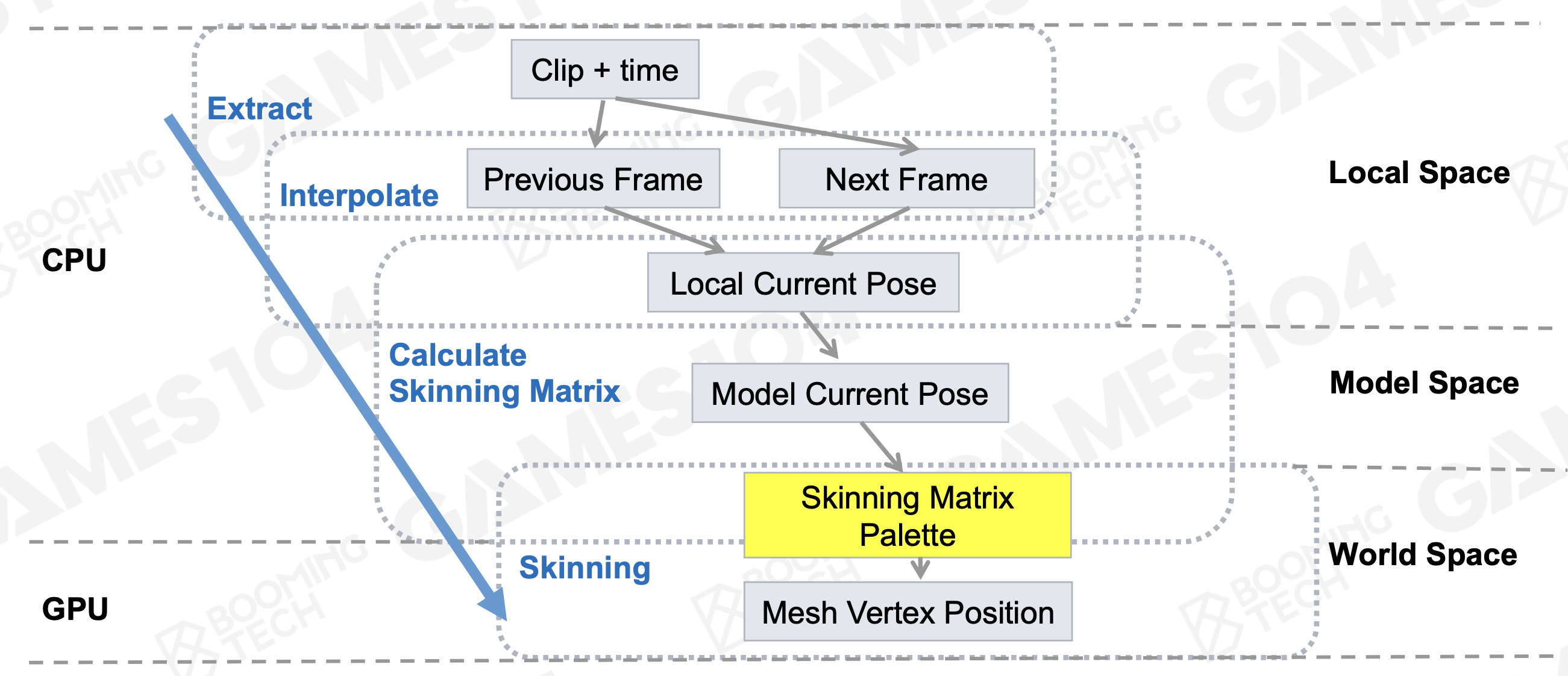
Different Spaces
- Local space, Model space and World space
Skeleton for Creatures - Comprised of a hierarchy of rigid pieces known as joints
- One joint is selected as the root
- Every joint has a parent joint except the root
Joint vs. Bone
- The joints are the objects directly manipulated by the animator to control motion
- The bones are the empty space between the joints
Humanoid Skeleton in Real Game - Number of joints in a humanoid skeleton
- Normal : 50~100 joints
- May more than 300+ joints include facial joints and gameplay joints
Joints for Game Play -Additional joints
- Weapon joint
- Mount joint
Where to Start the Skeleton – Root Joint
Root joint
- The center of the feet
- Convenient to touch the ground
Pelvis joint
- The first child joint of the root joint
- Human upper and lower body separation
Bind Animation for Objects
- Attach two skeleton’s bind point
Bind Pose – T-pose vs. A-pose
The pose of the 3D mesh prior to being bound to the skeleton
- Keep the limbs away from the body and each other, making the process of binding the vertices to the joints easier
- Usually close to natural pose
T-pose vs A-pose
- Shoulders in A-pose are more relaxed
- Easy to deformations in A-pose
Skeleton Pose: A skeleton is posed by transform its joints from the bind pose
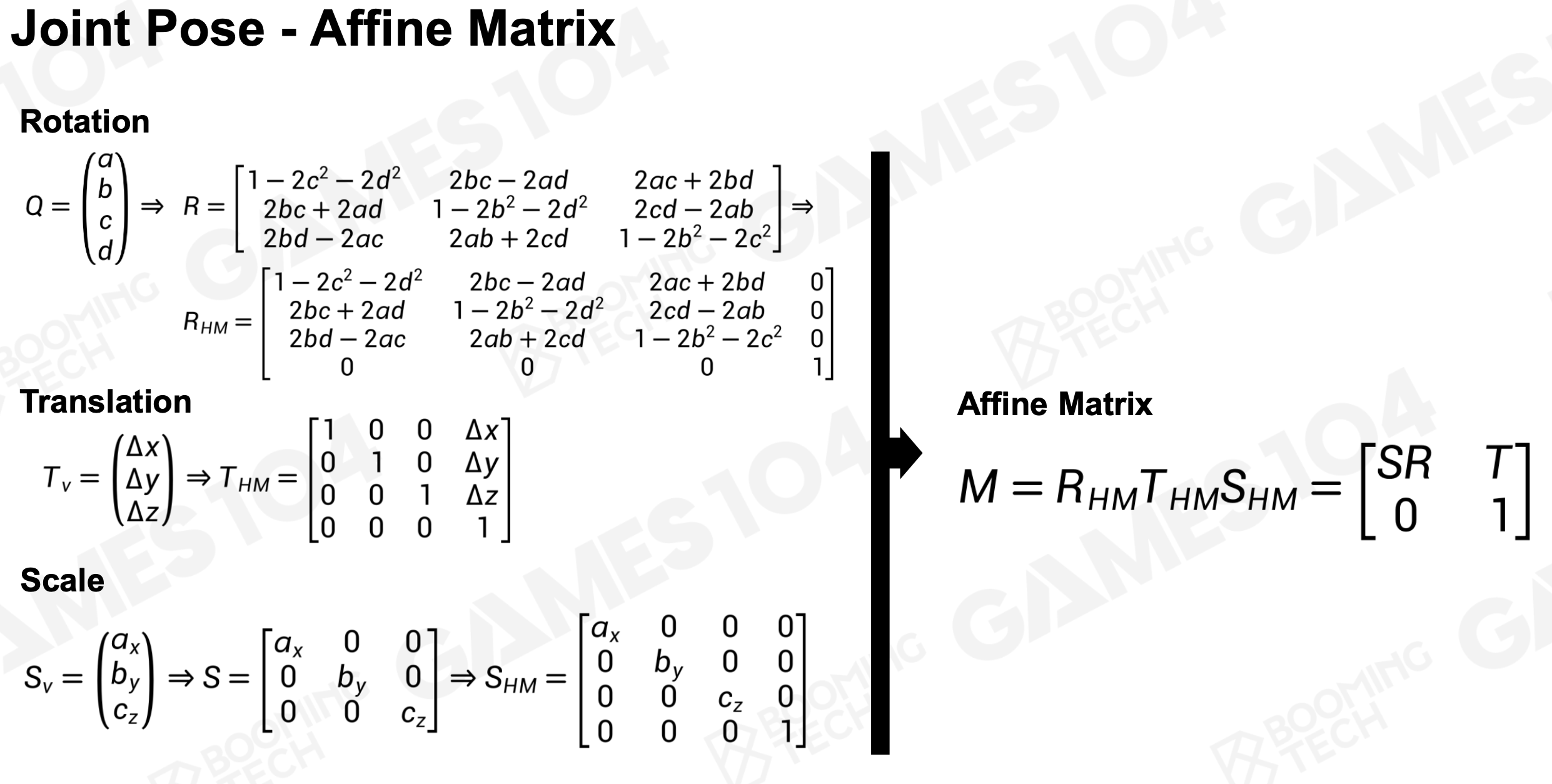
- Joint Pose (9 DoFs)
- Orientation (3 DoFs)
- Position (3 DoFs)
- Scale (3 DoFs)
Math of 3D Rotation
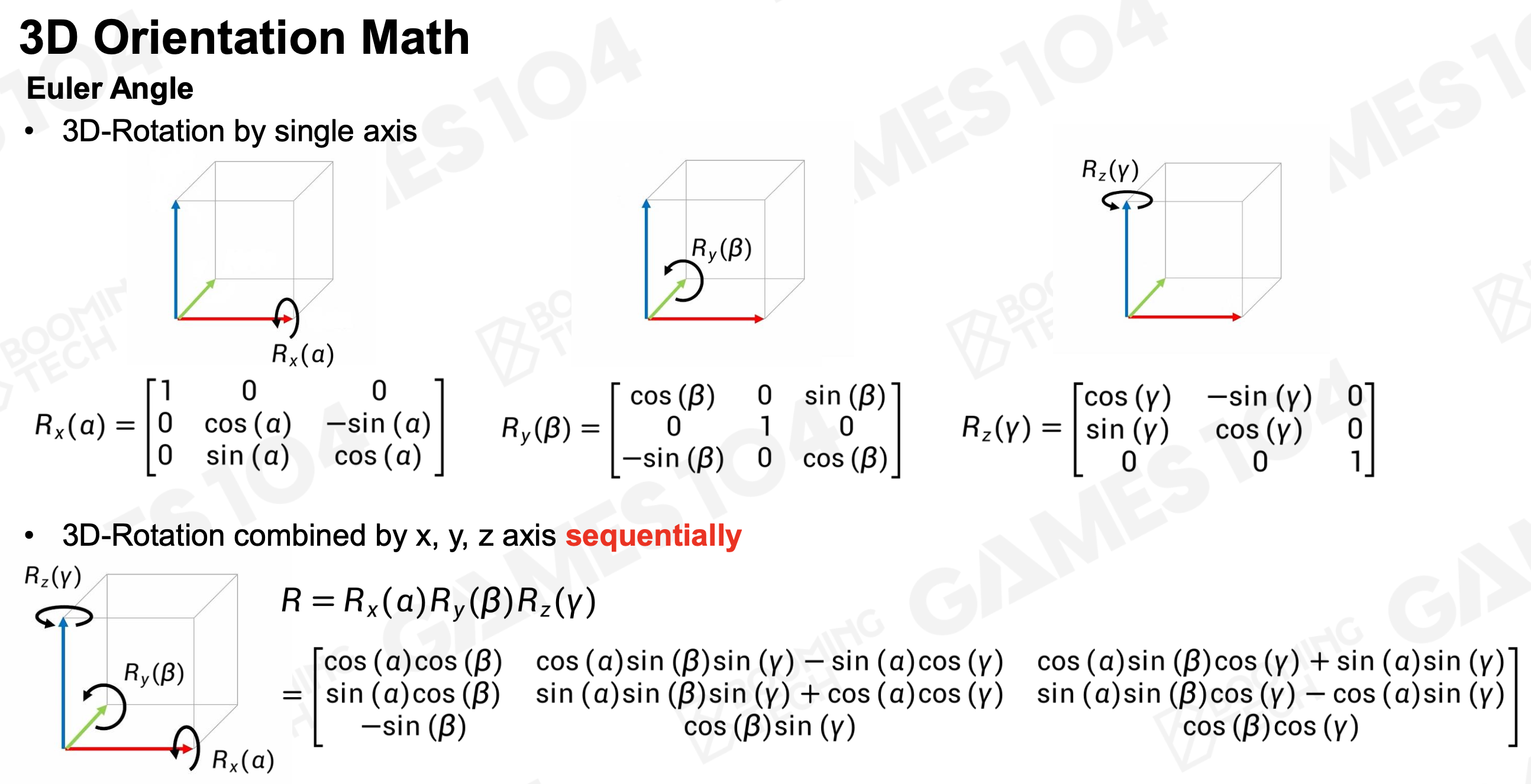
Euler Angle provides a brief description of 3D rotation and is widely used in many fields.
Problems of Euler Angle
- Gimbal Lock: Gimbal Lock occurs because of the loss of one DoF
- Hard to interpolate: Singularity problem make it hard to interpolate
- Difficult for rotation combination: Rotation combination need rotation matrix
- Hard to rotate by certain axis: Easy to rotate by x,y,z axis but hard to others
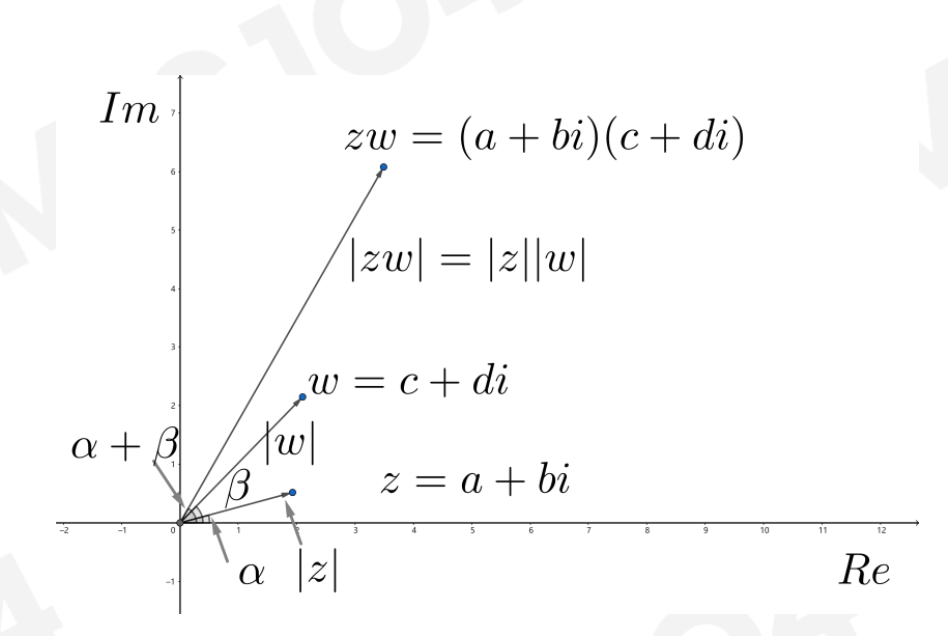
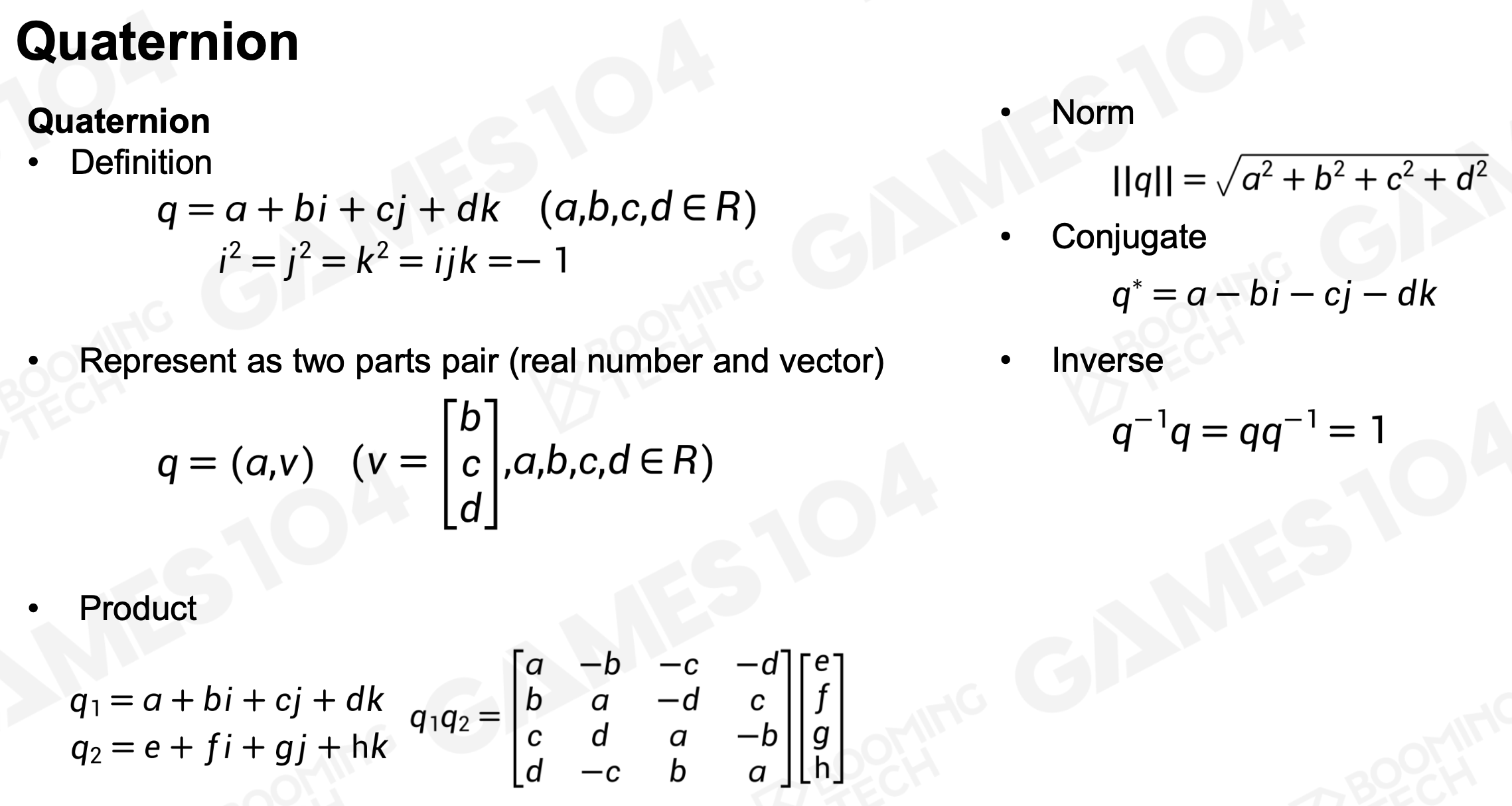
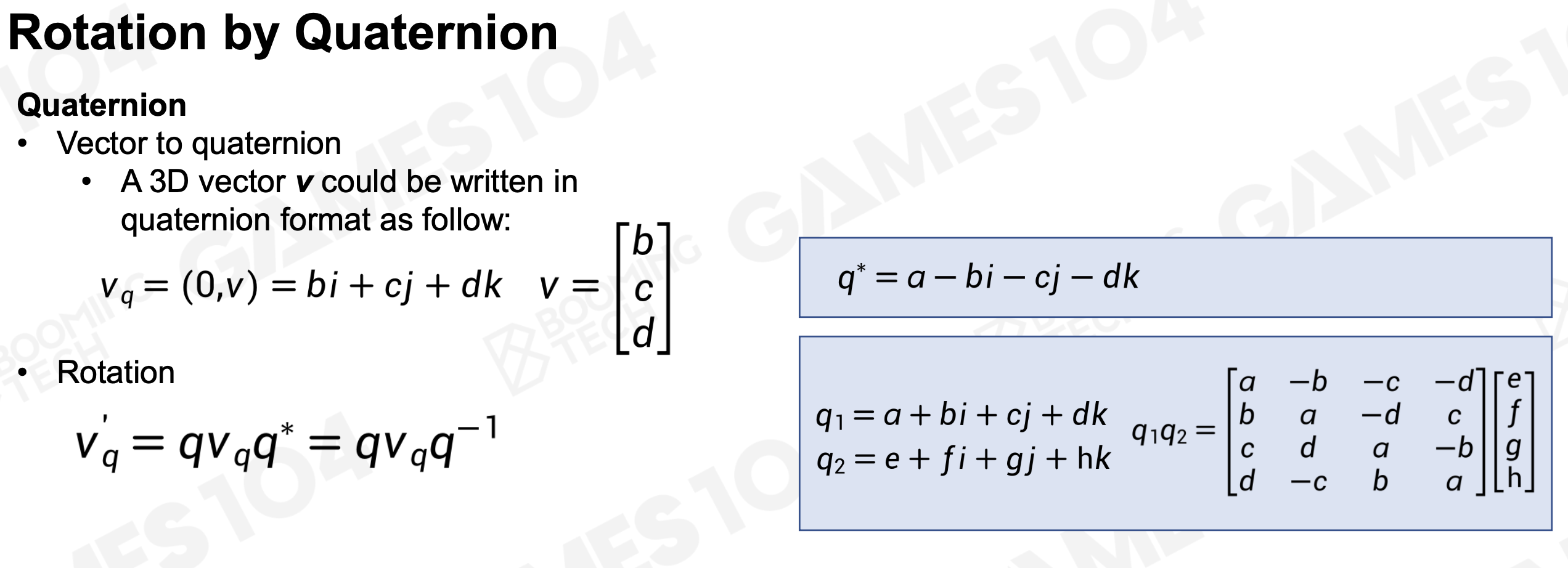
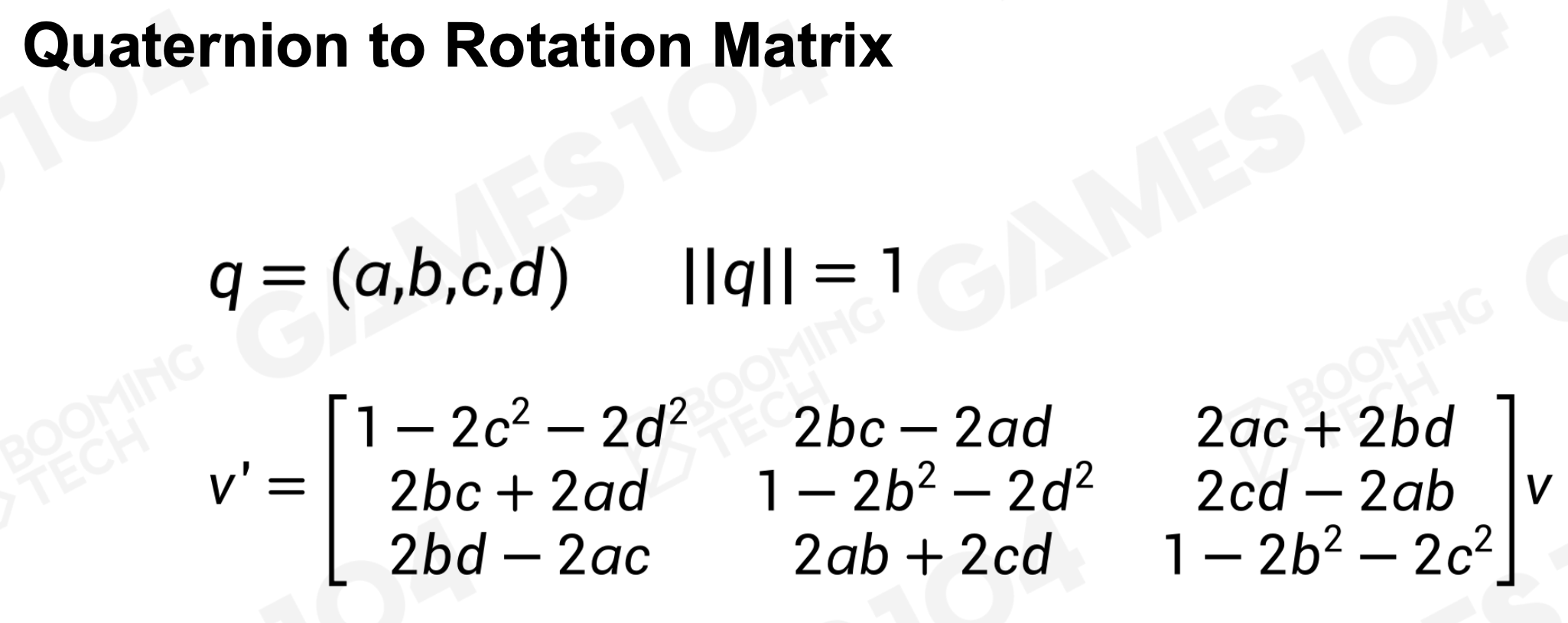
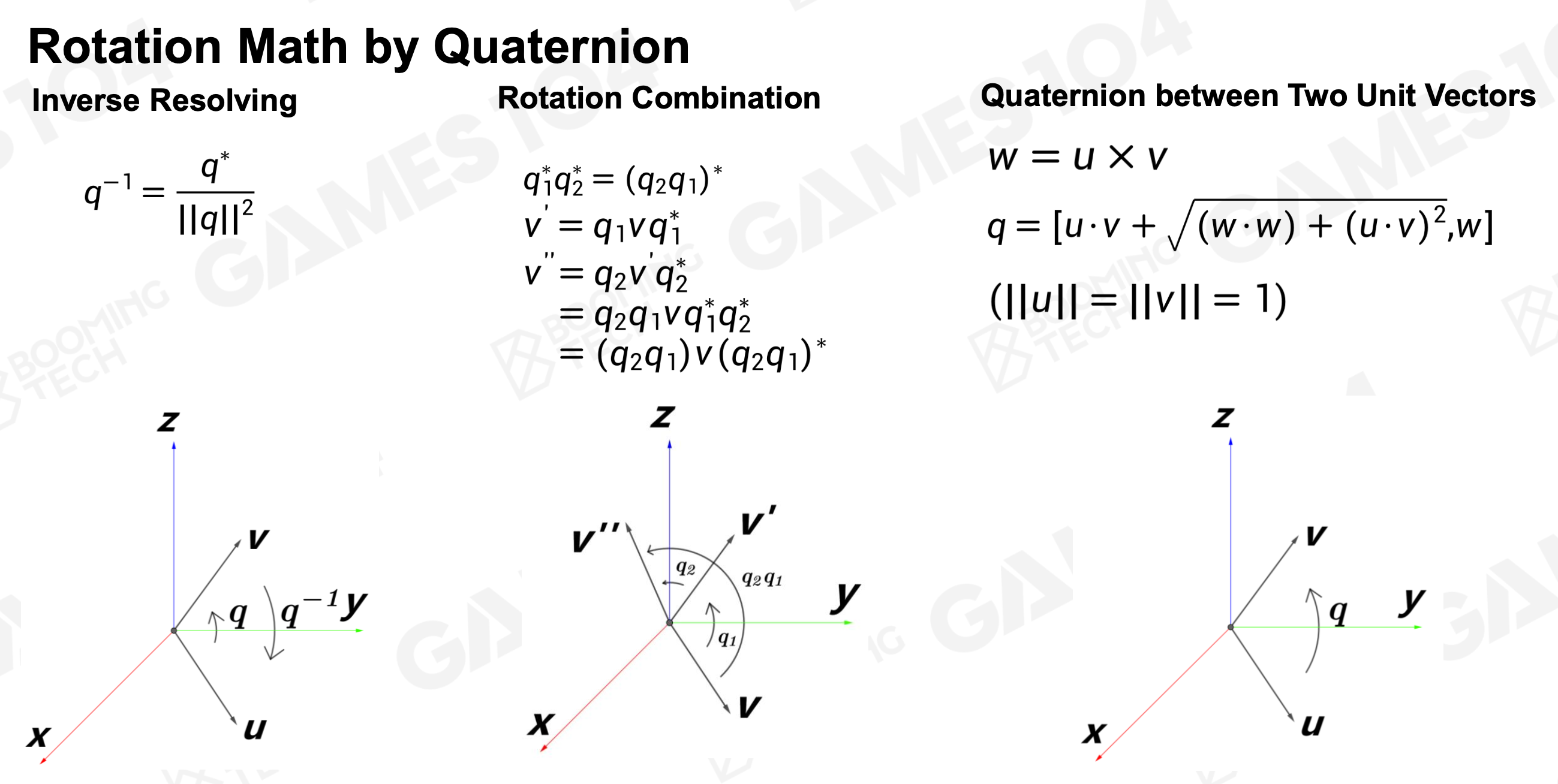
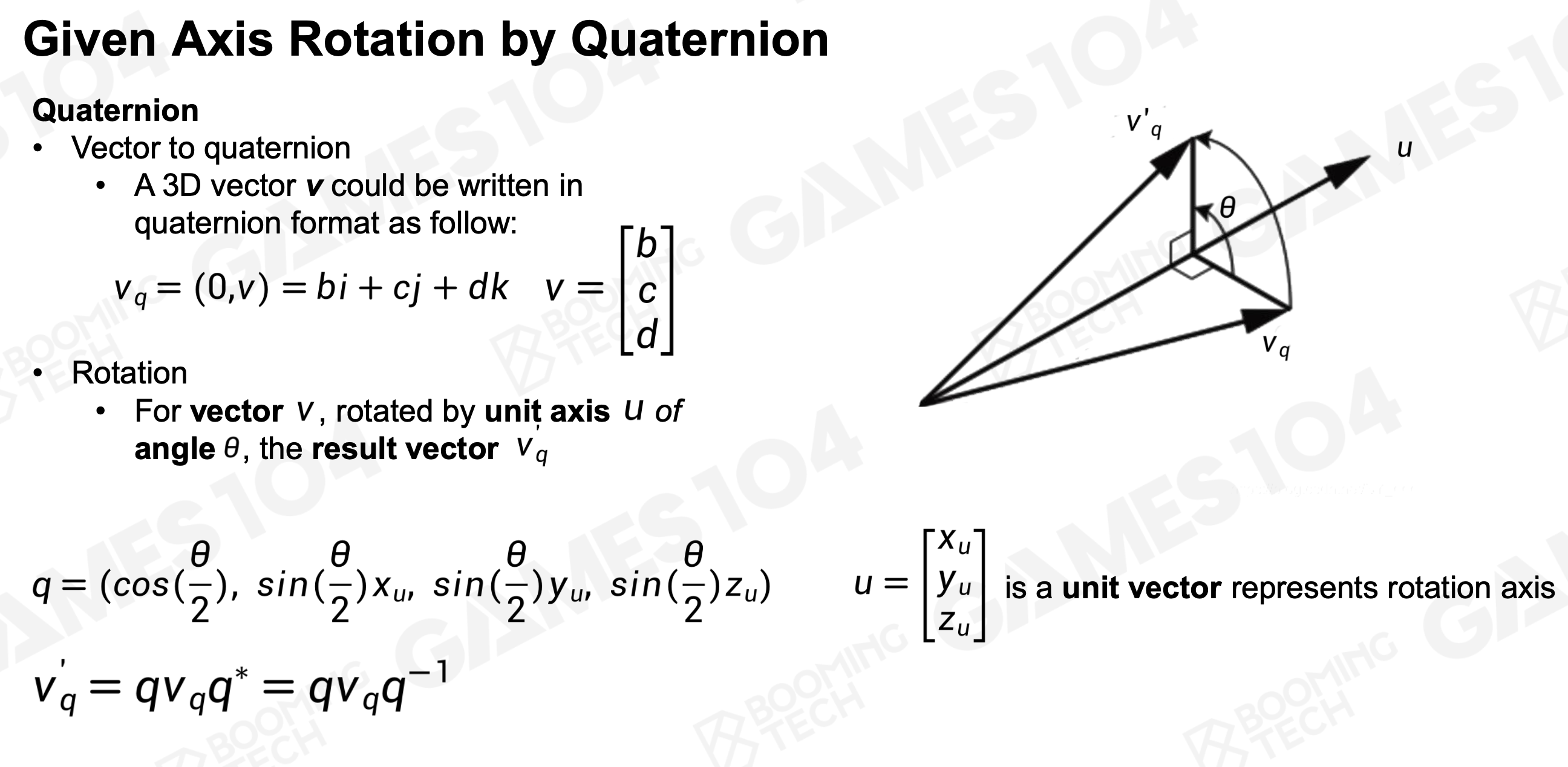
Quaternion
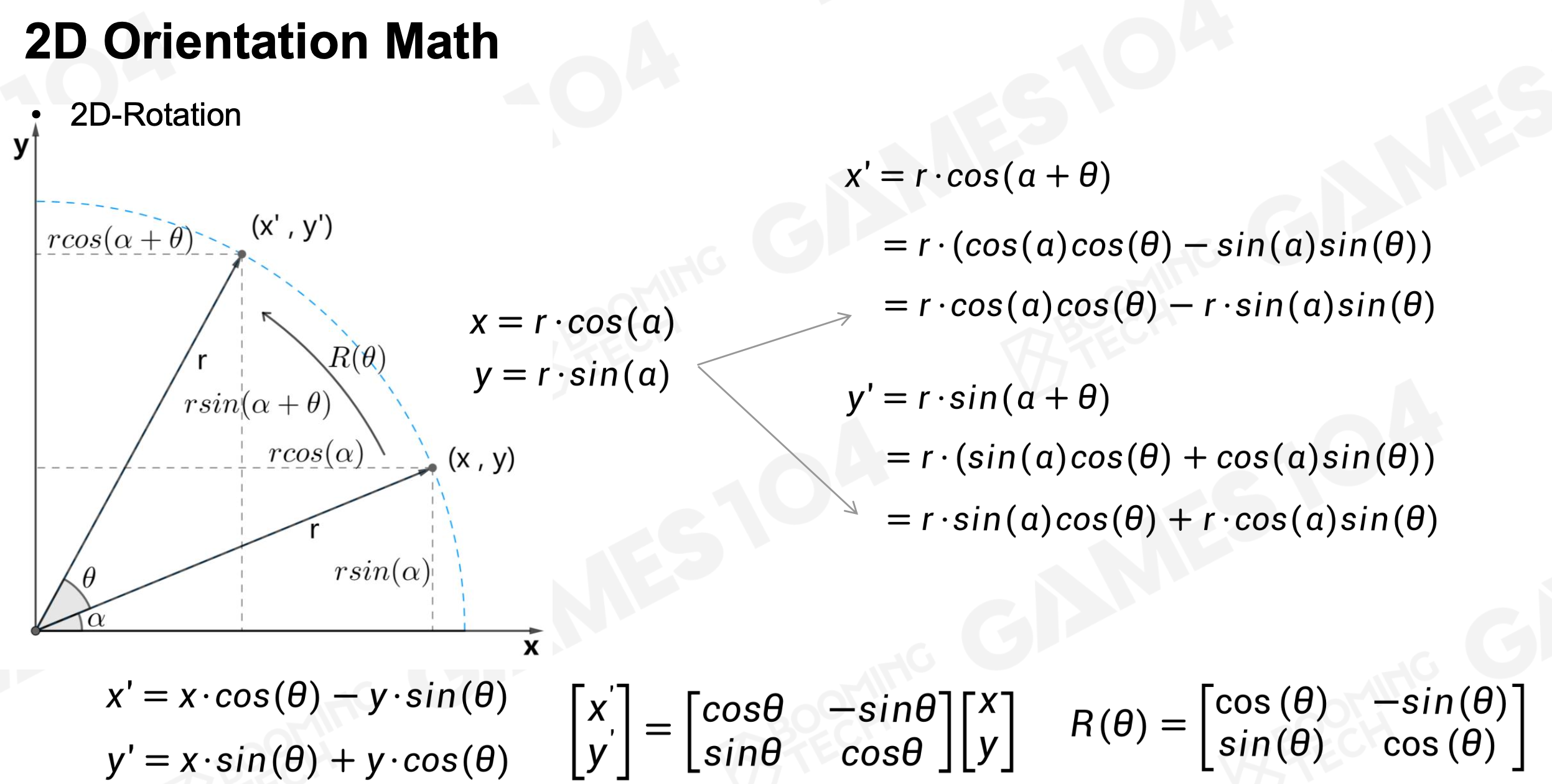
Complex Number and 2D Rotation
Joint Pose
Joint Pose - Orientation
- Rotation -> Change the Orientation of joints
- Most skeleton poses change orientations of joints only
Joint Pose - Position
- Translate -> change position
- Translate point P to point P’ by vector T
- Usually not changed in humanoid skeleton except the pelvis, facial joint and other special joints
- Used for stretching models
Joint Pose - Scale
- Scale -> change the size of the model
- Uniform vs. Non-uniform Scale
- Widely used in facial animation
- Uniform and non-uniform scale facial joints
Joint Pose - Affine Matrix
Joint Pose Interpolation - Local Space vs. Model Space
- Local Space
- Less data with delta transform
- Convenient for interpolation or blend
- Model Space
- Incorrect for interpolation
Single Joint Skinning - Attach the vertices of a mesh to a posed skeleton
- Each vertex can be bound to one or more joints with a weight parameter
- The vertex position in each bound joint’s local space is fixed
Quaternion Interpolation of Rotation NLERP vs. SLERP
- NLERP
- Non-constant angular speed
- Almost constant angular speed when θ is small
- SLERP
- Constant angular speed
- May have zero-divide problem when θ is small
- Combination
- Widely used in 3A-game development
- Use SLERP when θ is large, and NLERP when θ is almost zero
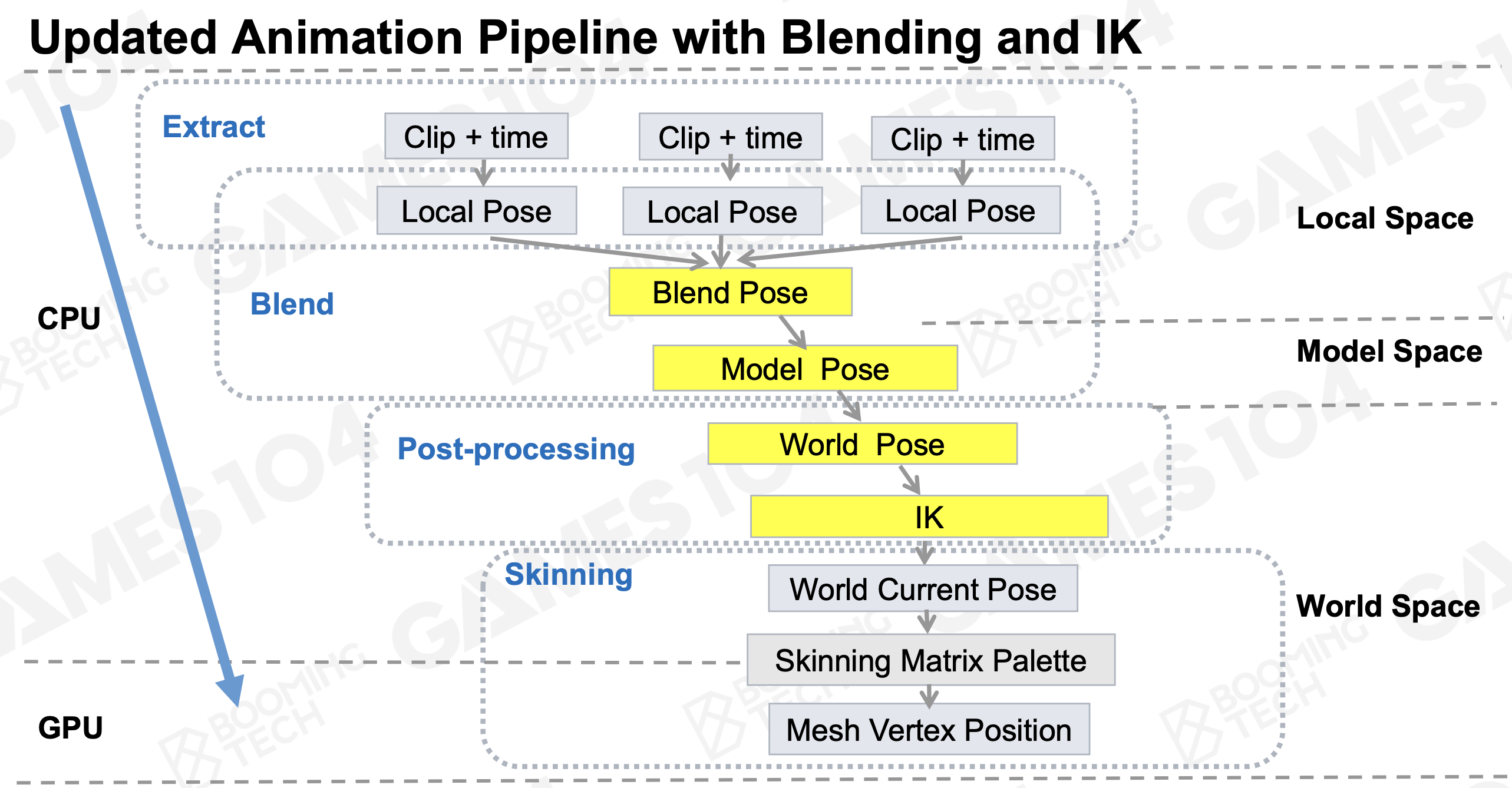
Simple Animation Runtime Pipeline
Catmull-Rom Spline (used for compressing animation)
- Fitting Process
- Make a Catmull-Rom spline with the middle 2 control points at both ends of the original curve
- Iteratively add control points like binary search
- Calculate inner curve by the most closet 4 points
- Repeat until the error of each frame is under the threshold
Advanced Animation Technology
Animation Blending
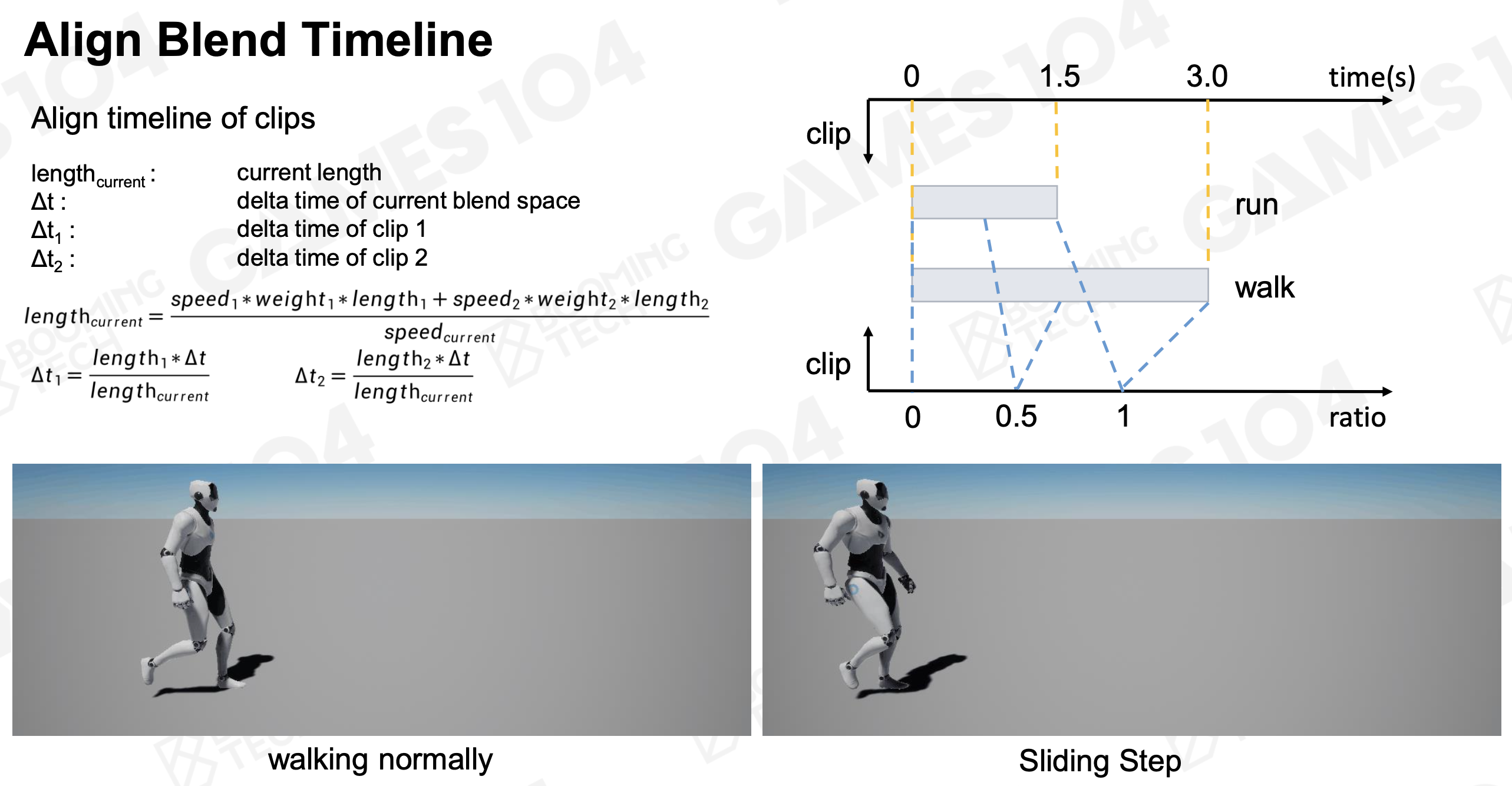
Math of Blending: LERP
- Use LERP to get intermediate frame from poses of different clips Weight is controlled by game parameters, i.e, character speed
Align Blend Timeline
Blend Space
1D Blend Space: Directional Movement
Players can move forward from multiple angles
We can blend any angle from three clips:
- Strafe Left clip
- Run Forward clip
- Strafe Right clip
The technique is called 1D Blend Space.
2D Blend Space:
- Since the movement speed in the lateral direction is lower in the forward direction, the character should enter the running state in a lower speed in the lateral direction. (Delaunay Triangulation)
Skeleton Masked Blending:
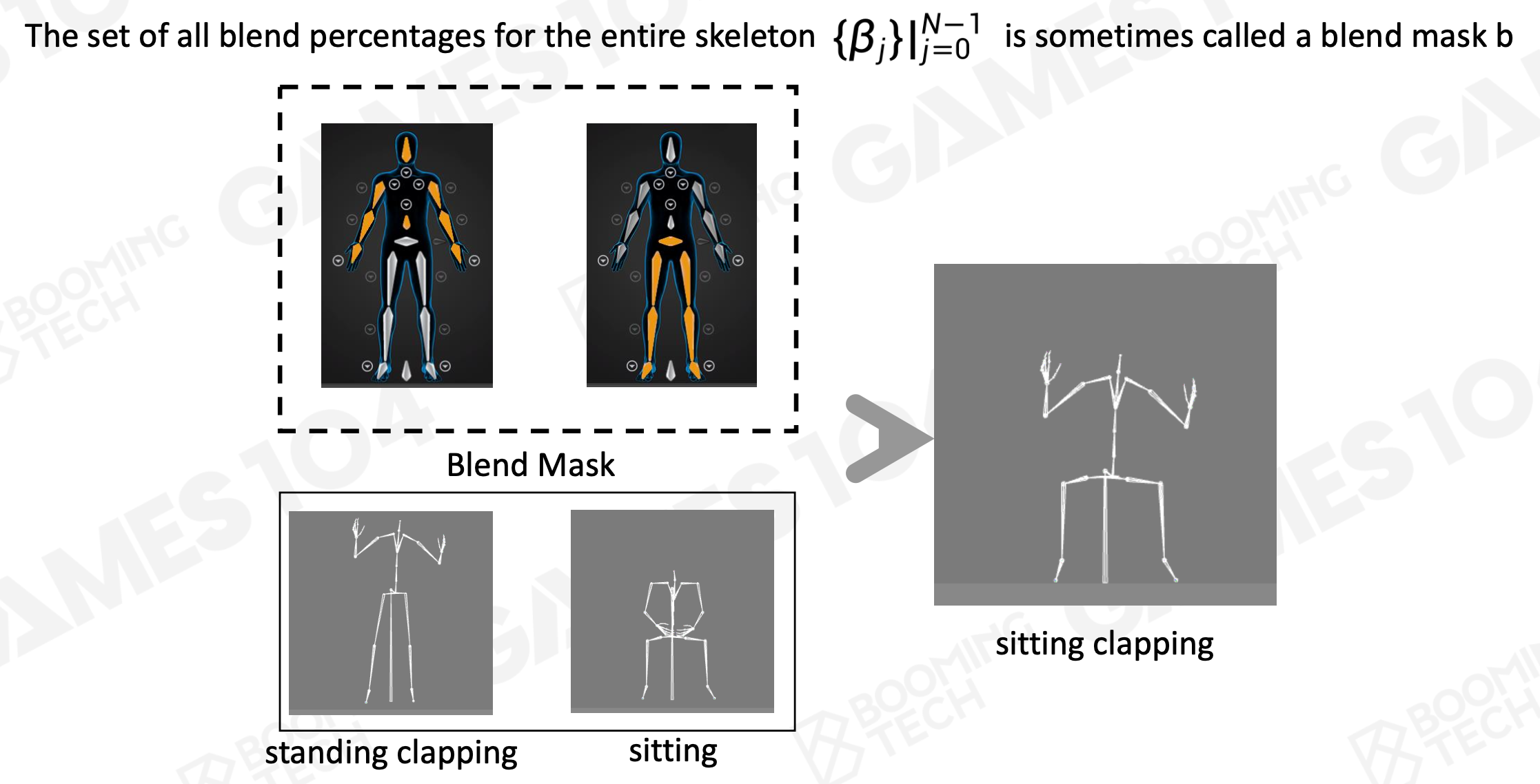
Additive Blending:
-
Add a difference clip into a regular clip to produce a new clip.
-
Additive Blending introduces a new kind of animation called a difference clip, which represents the difference between two regular animation clips.
-
A difference clip can be added into a regular animation clip in order to produce interesting variations in the pose and movement of the character.
-
Additive blends are more likely to have abnormal bone results.
Animation State Machine
Case: Jumping
- Three clips: Start jump -> In the air -> Land
- Blend Space is synchronous, but jump is stateful
- We usually model the jumping action via a finite state machine, commonly known as the Action State Machine (ASM)
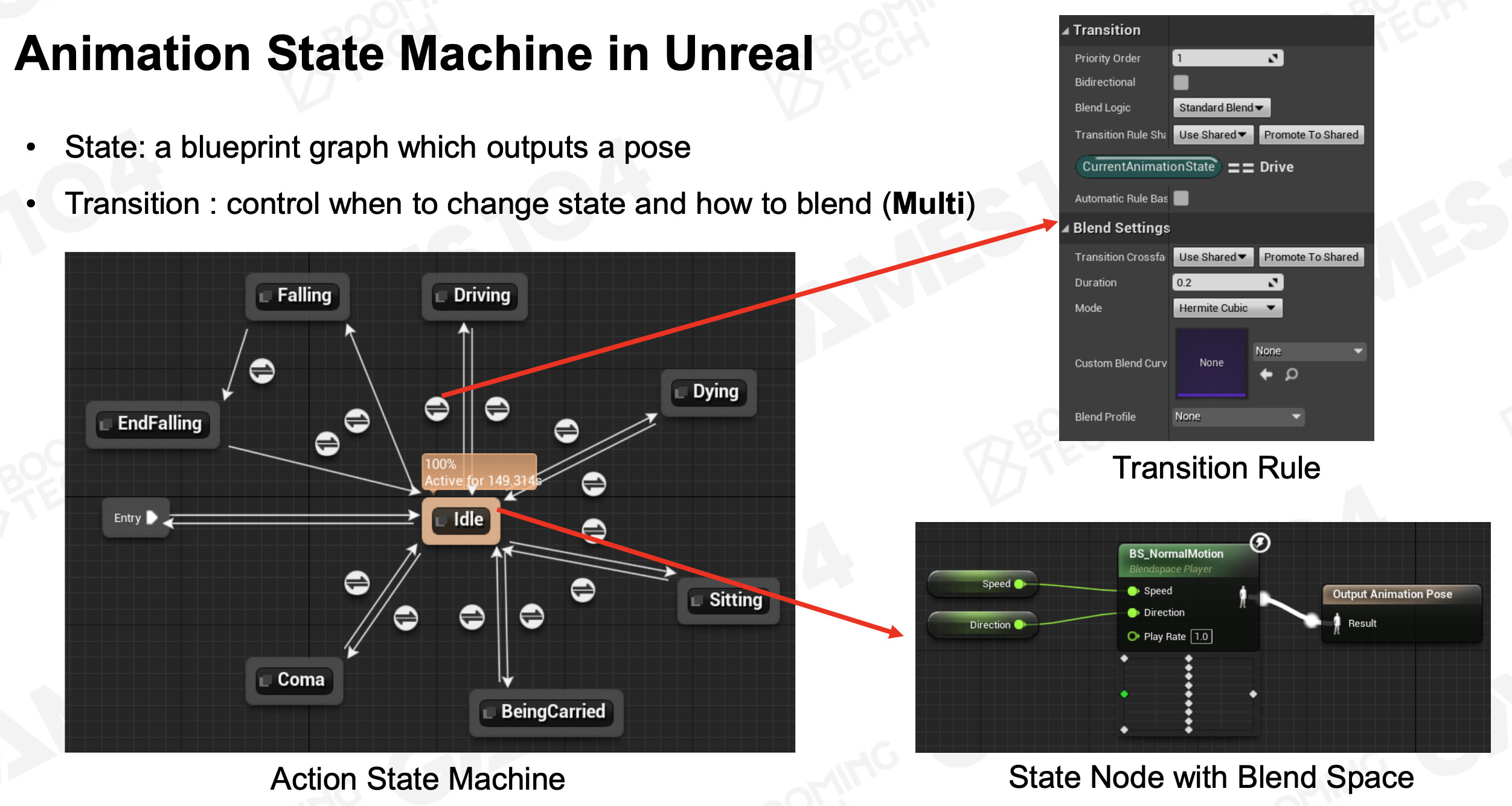
ASM Definition:
- ASM consists of nodes and transitions
- Node types
- Blend space
- Clip
- Transition type
- simply “pop” from one state to another
- cross-fade from one state to the next
- Special transitional states
Cross Fades: Two common ways
- Smooth transition
- restriction: the two clips must be looping animations, and their timelines must be synchronized
- Frozen transition
- Different cross fades curve could be used for different demands
Animation State Machine in Unreal
Layered ASM:
- different parts of a character’s body to be doing different, independent or semi- independent actions simultaneously
Animation Blend Tree
Blend Tree
- Structure layered ASMs and operations as a tree
- Inspired by expression tree
- Easy to understand for animators
- For a blend tree
- Non-terminal nodes and terminal nodes (leaf nodes)
- The result of each non-terminal node is a pose
LERP Blend Node
- Binary LERP node
- Basic non-terminal node in blend tree
- LERP two input poses with weight β into one output pose
Usually extended to handle multiple inputs (e.g. Ternary/Quad LERP node)
Additive Blend node
- Basic non-terminal node in blend tree
- Add the second input pose (usually a difference one) into the first input pose by weight β
Express Layered ASM in Blend Tree
- Use a blend tree to describe the desired final pose of ASMs
Blend Tree Nodes:
Terminal node (Leaf Nodes)
- Clip
- Blend Space
- ASM
Non-terminal node (No-Leaf Nodes)
- Binary LERP blend node
- Ternary (triangular) LERP blend node
- Binary additive blend node
Inverse Kinematics (IK)
Basic Concepts
- End-effector
- The bone which is expected to be moved to a desired position
- IK (Inverse Kinematics)
- The use of kinematic equations to determine the joint parameters of a manipulator so that the end-effector moves to a desired position
- FK (Forward Kinematics)
- The use of the kinematics equations of a robot to compute the position of the end-effectors from specified values for the joint parameters
Tone Bones IK
- 3D space
- Determine the final pose by a vector
Complexity of Multi-Joint IK Solving
- Computation cost: high dimension non-linear function solving in real-time
- May have multiple solutions, unique solution or no solution
Check Reachability of the Target
Constraints of Joints
Heuristics Algorithm
Why? Too many joints + constraints, difficult to solve with analysis method
Basic Idea
- Designed to solve problem in faster and more efficient fashion by sacrificing optimality, accuracy, precision, or completeness for speed
- Approximation
- Global optimality is not guaranteed
- Iteration is usually used with a maximum limit
CCD (Cyclic Coordinate Decent)
- Principle
- From joint-to-joint, rotates the end-effector as close as possible to the target, solves IK problem in orientation space
- Reachability
- Algorithm can stop after certain number of iterations to avoid unreachable target problem
- Constraints
- Angular limits is allowed, by checking after each iteration
Optimized CCD:
- Add tolerance regions to each bone’s goal
- Each bone stops rotating and moves onto the next bone within tolerance region
- Helps to produce poses that are less rigid and more comfortable looking
- Use under-damped angle scaling
- Each joint moves only a small amount toward the goal and distributes the movement across multiple bones
- Produce less abrupt joint changes and more smooth and casual poses for character movement
FABRIK (Forward And Backward Reaching Inverse Kinematics)
- Principle: Instead of orientation space, solves IK problem in position space
- Reachability: Algorithm can stop after certain number of iterations to avoid unreachable target problem
- Cons: Not guarantee convergence
FABRIKF with Constraints: Re-positioning
- Joint restrictions can be enforced at each step by taking the resultant orientation and forcing it to stay with in the valid range
Multiple End-Effectors
- May result in conflict between goals, which can not be achieved simultaneously
- May use a priority or a weighted approach
IK with Multiple End-Effectors
- If a shared bone needs to be moved, the end-effector that is updated last will get priority and the other bones will be pulled away
Other IK Solutions:
Physics-based Method
- More natural
- Usually need lots of computation if no optimization
PBD(Position Based Dynamics)
- Different from traditional physics-based method
- Better visual performance
- Lower computational cost
Fullbody IK in UE5
- XPBD(Extended PBD)
Animation Pipeline with Blending and IK
Facial Animation
Face is Driven by Complex Muscle System Facial Muscles
- 43 Muscles
- Variant shape, strength and movement
- Work together to make expressions
High Precision Requirements – Minor change makes difference:
- Voluntary / Forced
- Natural / Intentional
- Sometimes shows quite opposite expressions
Facial Action Coding System (From Movie Industry)
- Facial Action Coding System (FACS) is a system to taxonomize human facial movements by their appearance on the face.
- There are 46 basic movements named action units(AU).
- An expression can be considered as a combination of some of the basic movements.
28 Core Action Units
- Apple Inc. extracted the 28 core AUs
- 23 Symmetric AUs are divided into two basic actions
- Basic actions set varies accoring to the animation production requirements
FACS In Morph Target Animation
- Create AU key poses only store vertexes different from the neutral pose (Additive Blending)
UV Texture Facial Animation
- Using a series of texture maps applied to a simple head shape
Animation Re-targeting
Share Animation Among Characters
- Allow animations to be reused between characters (save animator’s work)
- Adapt motion captured animations to different characters (reduce the cost)
- Terminology:
- Source Character
- Target Character
- Source Animation
- Target Animation
- Ignore Offset Between Source and Target Joints
- Keep Orientation in Different Binding Pose (Relative movement)
Process Tracks – Handle animation tracks respectively
- Rotation track comes from source animation
- Keep joint orientation in animation
- Translation track comes from target skeleton
- Keep the proportion of target skeleton
- Scale track comes from source animation
- Keep the scale in animation
Align Movement by Pelvis Height – The movement of the character
- Usually controlled by displacement curve or motor system at runtime
- Displacement Curve is extracted from the pelvis pose in animation
- Needs to be scaled by the proportion of the pelvis
Unresolved Problems of Re-targeting
- Self mesh penetration
- Self contact constrains (eg. the hands when clap)
- The balance of the target character